
Для чего вам камера на дроне?

Если же ваш видеопередатчик квадратного форм-фактора, то достаточно будет просто скрутить провода спиралью.
Купить камеру для FPV полетов можно .
Эта камера позволит видеть так, как будто вы пилотируете квадрокоптер сидя в его кабине. Весьма занимательное занятие — можно сказать полный полет и отрыв и полная безопасность! Максимум чем вы рискуете — это самим квадрокоптером, пилоты же рискуют жизнью.
Рекомендую так же посмотреть статью Камеры для FPV полетов на квадрокоптере.
Камера для дрона может использоваться для решения многих задач, которые условно разделяются на 2 глобальные группы:
- Фото и видео съемка, а также обзор местности, над которой летит дрон
- FPV управление
В продвинутых моделях летательных аппаратов могут одновременно использоваться две камеры (и даже больше). Одна обеспечивает FPV управление, тогда как вторая ведет качественную съемку. Такое разделение возникло не случайно. Экшн-камеры, часто устанавливаемые на дроны, в большинстве своем способны только снимать, но не могут передавать видеосигнал на монитор. Либо же делают это с некоторыми ограничениями. Проблема решается покупкой FPV оборудования.

Все это приводит к задержке. Для неторопливых полетов на открытом воздухе секундная задержка не имеет критического значения. Такое видео нельзя назвать реальным и, хотя производитель коптера обещает FPV управление, в действительности пилот получает сигнал не сразу.
Аналоговые FPV комплекты для квадрокоптеров работают с минимальной задержкой. Видеопоток не обрабатывается, а сразу транслируется на аппаратуру управления. Для гоночных дронов, для полетов в окружении большого количества потенциальных препятствий (например, плотная городская застройка, лес), для профессиональной видеосъемки все это имеет большое значение.
Итак, выбор обуславливается теми задачами, что будут решаться. Для качественной съемки в комплектацию необходимо включить хорошую экшн-камеру с 3-х осевым подвесом, тогда как для настоящего управления «от первого лица» необходима аналоговая FPV-аппаратура.
На выбор доступны десятки, если не сотни камер для дронов. К самым известным производителям относятся компании Runcam, Foxeer, Caddx, Aomway, Boscam. Помимо видеоаппаратуры, они производят и другое FPV оборудование.
В наш топ вошли следующие устройства:
- Runcam Eagle 2 (Full, Micro)
- Foxeer Predator (Mini, Micro)
- Caddx SDR1 (Mini, Micro)
- Runcam Swift 2 (Full, Mini, Micro)
- Foxeer Predator Arrow V3 (Full, Mini, Micro)
- Caddx S1 (Mini, Micro)
Толкающие пропеллеры
Толкающие пропеллеры отвечают за передвижение летательного аппарата в воздухе вперед и назад. Название пропеллеров как раз и показывает принцип их работы. Поэтому располагаются они в задней части дрона, ведь их задачей является подавление крутящих моментов двигателя дрона во время обычного полета коптера, чтобы последний двигался либо вперед, либо назад в зависимости от команд с пульта управления.
 Низкошумные пропеллеры модели 8743 для квадрокоптеров серии DJI Mavic 2
Низкошумные пропеллеры модели 8743 для квадрокоптеров серии DJI Mavic 2
С технологической точки зрения, толкающие пропеллеры не отличаются от стандартных. Их изготавливают из пластика или композитных материалов. Они также могут иметь разные размеры в зависимости от модели дрона, а также иметь специальную защиту, которая спасет конструкцию от аварии и защитит людей от случайного касания краями винтов. Толкающие пропеллеры также необходимо постоянно проверять перед полетом на предмет их общего состояния и наличия или отсутствия повреждений.
Вариант №1. Сбить ружьем с земли
https://youtube.com/watch?v=9mS5UYvRkjg
https://youtube.com/watch?v=00aYgbwDaSQ
Когда в январе появились новости о том, что налоговая собирается снимать дачи беспилотниками, то к ним сразу посыпались комментарии: «Вот ружье дедово достану и сяду в засаду на дрона. Враг не пройдет!». Но такие рассуждения излишне оптимистичны.
Да есть дроны, которые низко летают и заставляют всех оборачиваться на шум. Но для скрытой съемки используют тех, которые незаметно летают на большей высоте. В первом видео дроны-шпионы (штат Техас) маскируется под звезды. В ночном небе без съемки с приближением они смотрятся довольно органично, и главное, их совсем не слышно.
Но даже простенький позапрошлогодний Syma X5SW Drone за пять косарей (третье видео) может пролететь незамеченным, если люди на объектах наблюдения не будет пристально вглядываться в небо и будут слушать музыку в наушниках.
На что обращать внимание?
При самостоятельном сборе квадрокоптера как предложенного, так и более сложного варианта, необходимо учитывать несколько основных факторов:
- Первый дрон лучше сделать самым простым для выявления собственных ошибок в сборке.
- Всегда перепроверять все расчеты и замеры, чтобы избежать падения устройства, заносов в сторону и т.п.
- Не стоит приобретать некачественные детали для сборки, за счет которых повышается риск сбоев в работе оборудования.
- Обязательно проводить тестовый полет и своевременно устранять все возможные недочеты.
Нужно быть готовым к тому, что в первое время всё будет ломаться. Самое, что первое ломается – пропеллеры, двигатели, рама. Через некоторое время – аккумуляторы.
Лучше всего для начала взяться за изготовление простой, легкой модели, без камеры. Это нужно для того, чтобы научиться управлять. Потом, если это занятие не надоест, и будет возможность, можно браться за изготовление более солидной модели.
На этом статья Константина заканчивается, ждём продолжения с реальным аппаратом!
Если статья понравилась, голосуйте за неё при подведении итогов, которое состоятся в декабре. Чтобы ничего не пропустить, подписывайтесь и вступайте в группу ВК!
Моторы (Двигатели)
Компания DYS на данный момент выпускает бюджетную версию двигателей под названием «Samguk». Фирма очень хорошо себя зарекомендовала в сообществе пилотов, как качественный и недорогой производитель моторов для квадрокоптеров. Красивый дизайн моторов и открытый низ для уменьшения веса — это моторы Samguk. В линейку входят 3 размера/мощности двигателя: «Wu» — 2206, «Shu» — 2306, а также «Wei» — 2207.







Мы рекомендуем купить Wu» — 2206, так как это будет самым оптимальным вариантом цена\мощность\качество.
Моторы DYS Samguk серии Wu 2206Цена за 4 двигателя: 2526р или 40$
DYS Samguk
Banggood | Aliexpress
Моторы DYS Samguk серии Shu 2306Цена за 4 двигателя: 2526р ил 40$
DYS Samguk
Banggood | Aliexpress
Моторы Racerstar SPROG X 2206Цена за 5 двигателей (1 запасной): 2869р или 45,39$
Racerstar SPROG
Banggood | Aliexpress
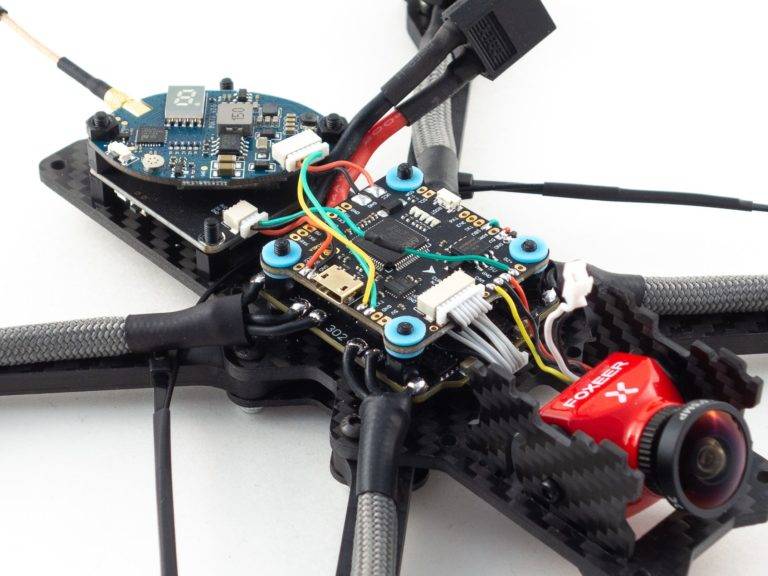
Связь
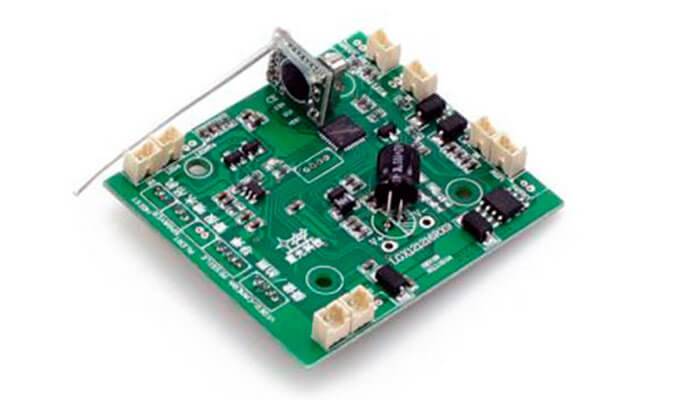
Приёмник. Полётный контроллер.
Предположим, что на этом уроке вы сделали выбор в пользу радиоуправления в качестве устройства ввода. Если вы хотите использовать WiFi, Bluetooth или другой способ ввода, пожалуйста, прочитайте инструкцию по контроллеру полёта и найдите последовательный ввод; в этом разделе будет описано, как/куда подключить устройство последовательного ввода к контроллеру полёта. Скорее всего, вам потребуется найти и подключить передающее (Tx), принимающее (Rx), напряжение (5В) и GND-контакты от беспроводного устройства к передатчику, обеспечивая Rx от одного к Tx другого, и наоборот.
Ваш RC передатчик должен приходить в комплекте с соответствующим RC приёмником. Приёмник должен быть привязан к передатчику, чтобы вы могли удалить перемычку привязки с приёмника (если она есть). В комплект также может входить держатель АА батарейки, которая предназначена для питания приёмника, но мы не будем использовать её, поскольку BEC будет питать как приёмник, так и контроллер полёта. Чтобы узнать, какие каналы RC приёмника подключаются к каким контактам на контроллере полёта, вам нужно взглянуть на руководство пользователя как контроллера полёта, так и RC системы.
В руководстве к контроллеру полёта будут указаны местоположения следующих контактов, которые должны быть согласованы и подключены к приёмнику:
- Throttle
- Pitch
- Yaw
- Roll
- Вспомогательные (Aux) переключатели 1, 2, 3 и т.д.
Теперь вы можете сделать следующие подключения:
- Прочитайте руководство к контроллеру полёта, чтобы увидеть, какой входной R/C контакт связан с какой из перечисленных выше функций.
- Прочтите руководство к передатчику, чтобы узнать, какой канал связан с каждой из функций.
- Некоторые RC передатчики могут быть перепрограммированы для изменения функций каждого контакта. Если вы решите изменить какой нибудь вход (джойстик или переключатель), делайте это лишь после того, как убедитесь, что знаете, какой канал на приёмнике соответствует какой функции. Throttle, Pitch, Yaw, и Roll всегда должны быть связаны с двумя стиками/джойстиками, а не с переключателями или кнопками.
- Подключите канал Throttle на приёмнике к входу Throttle на контроллере полёта.
- Подключите канал Pitch на приёмнике к входу Pitch на контроллере полёта.
- Подключите канал Yaw на приёмнике к входу Yaw на контроллере полёта.
- Подключите GND на контроллере полёта (обычно третий ряд контактов) к GND на приёмнике (обычно третий ряд контактов).
- Если будет использоваться вспомогательный вход, подключите Aux 1 на приёмнике к Aux 1 на контроллере полёта и так далее.
Сфера применения
Использовать quadrocopter можно и для серьезных целей. Оснащенный видеокамерой и передатчиком, он может передавать изображения с воздуха отслеживаемых объектов. К примеру, местонахождение голов скота на пастбище или состояние крыш и высоких памятников.
В его силах разведывать ледовые или сплавные заторы рек, передавать информацию о пробках и ситуации на дорогах. квадрокоптер используется и при лесных пожарах, давая обзор направления движения огня. В общем, везде, где есть необходимость получения панорамной картинки с высоты – он первый помощник. Включая сферы спасения жизни и поиска людей.
Из остальных очевидных методов применения дрона – переноска им по воздуху каких-либо грузов. Летательному аппарату не страшны плохие дороги или их полное отсутствие, а удаленное управление позволяет использовать его в любую погоду без риска для жизни пилота.
Квадрокоптер с грузом
Есть и не очевидные способы применения квадрокоптеров. К примеру, в некоторых крупных торговых центрах летательные аппараты подобного типа производят замену ламп освещения под потолком. Захват выполняется в специальный держатель, после чего дрон вращается, выкручивая светильник, и транспортирует его на землю. В него устанавливают целую лампу, которая перемещается вместе с аппаратом по воздуху обратно и вкручивается. В результате – нет риска для персонала, а работа выполнена.
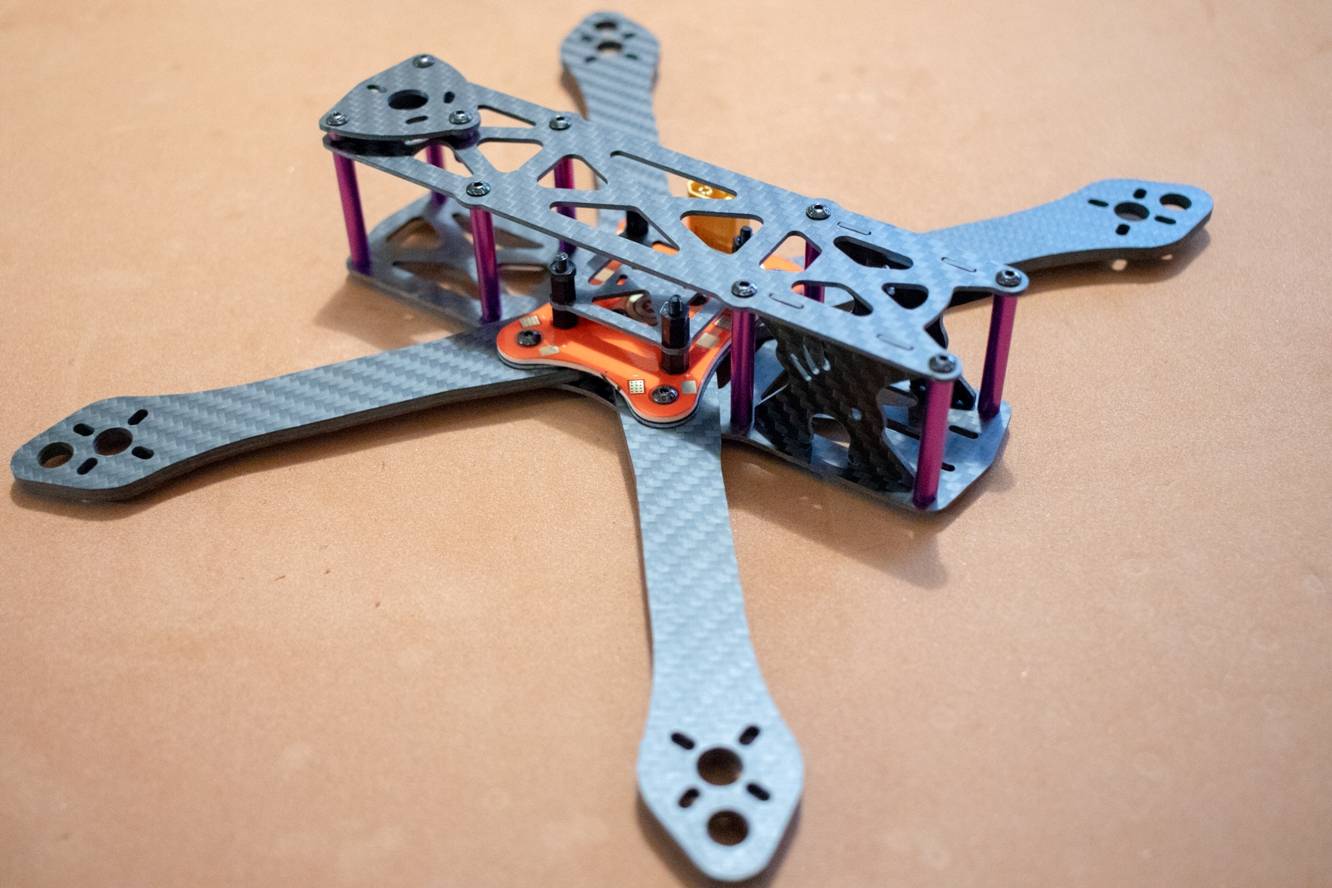
Рама квадрокоптера
Этот пункт имеет в основном эстетическое значение, рам очень много, но классика одна — это рама типа Х, либо менее классический вариант — рама типа Н.
Рама Х достаточно компактная, внутренние компоненты хорошо защищены. Аккумулятор крепят на нижнюю часть. Легкая.
Рама H просторная, хорошо защищает компоненты, плюсом является и то, что аккумулятор крепится на верхней стороне, а значит, он будет менее подвержен ударам. Немного тяжелее рамы Х за счет большей площади.
Рамы Х:
TransTEC Frog Lite 218mmЦена: 1768р или 28$
TransTEC Frog
Banggood | Aliexpress
Realacc Purple215 215mmЦена: 1705р или 27$
Realacc Purple215
Banggood
Рамы Н:
Lisam LS-210 210mm — https://goo.gl/p1aU5KЦена: 750р или 10$
Lisam LS-210
Banggood | Aliexpress
Martian 215 215mmЦена: 1326р или 21$
Martian 215
Banggood | Aliexpress
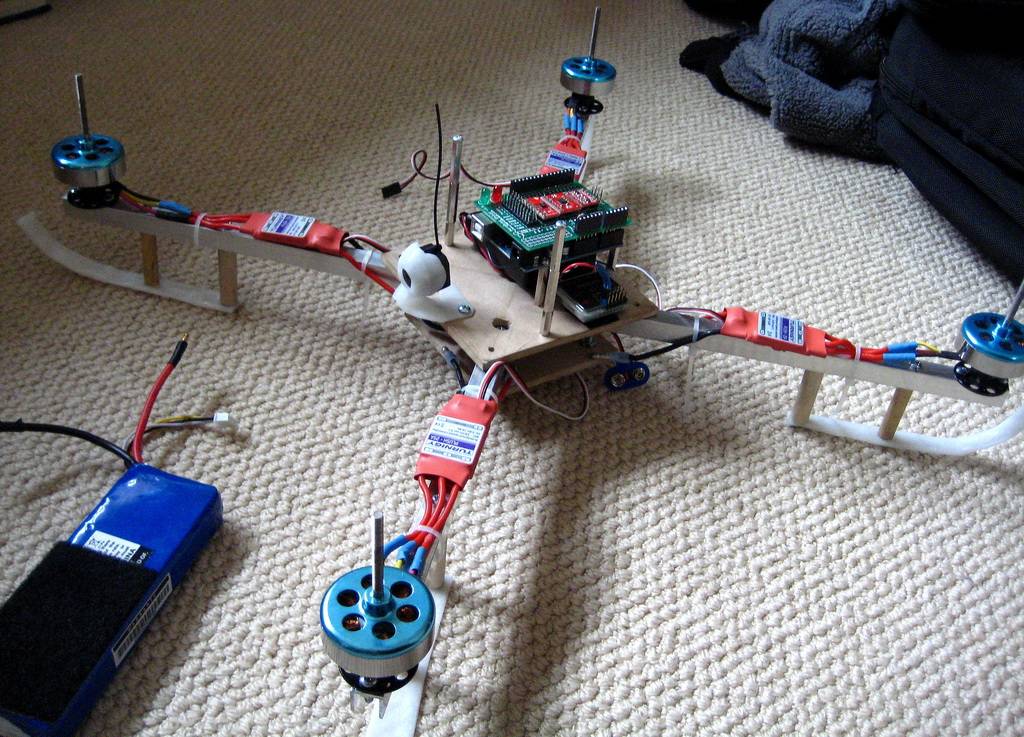
Сборка в несколько шагов
Первым действием является установка управляющей платы, ее размещение должно быть максимально близким к центру платформы из фанеры. Для прикручивания лучей к плате используются саморезы. Чтобы закрепить аккумулятор и посадочные лыжи – можно использовать алюминиевую липкую ленту.
Приемник сигнала устанавливается в непосредственной близости к плате. Для этого вполне подойдет качественный суперклей. Соединение с платой происходит за счет 2-х трехжильных шлейфов, но только когда приемочный канал выполняет те же функции, что и канала на управляющей плате.
Для подключения платы управления нужно ознакомиться с инструкцией.
Следующим этапом является установка двигателей. Необходимо учитывать, что расстояние между краями платформы и осью вращения должно быть эквивалентно друг другу. Также необходимо предусмотреть отверстие для валового хвоста. Подготавливая отверстия, следует просверлить их насквозь на весь квадрат. Это нужно чтобы оценить будет ли вал цепляться за края.
Еще одним этапом сборки становится подключение проводки питания. Для этого процесса используются переходники или клеммы, из которых составляется параллельное соединение 4-х проводов. Также потребуется установка разъемного соединения в месте подключения к проводам батареи питания устройства. Во всех остальных местах производится спаивание для надежности.
Чтобы избежать поломки конструкции во время полета за счет вибрации, порыва ветра, резкой смены направления и т.д. все детали закрепляются при помощи термоусадки, хомутов, саморезов. После этого можно подключать провода драйвера к управляющей плате, и запускать режим тестирования для выявления проблем.
Безопасность
Все новички, думая о безопасности, вспоминают AR.Drone и его защиту винтов. Это хороший вариант, и он работает, но только на мелких и легких аппаратах, а когда вес твоего коптера начинает приближаться к двум килограммам или давно перевалил за эту цифру, то спасти может только прочная железная конструкция, которая будет весить очень много и, как ты понимаешь, сильно уменьшит грузоподъемность и автономность полета. Поэтому лучше сперва тренироваться подальше от людей и имущества, которое можно повредить, а уже по мере улучшения навыков защита станет и не нужна. Но даже если ты пилот со стажем, то не забывай о технике безопасности и продумывай возможные негативные последствия твоего полета при нештатных ситуациях, особенно при полетах в людных местах. Не стоит забывать, что сбой контроллера или канала связи может привести к тому, что аппарат улетит от тебя далеко, и тогда для поиска может пригодиться GPS-трекер, установленный заранее на коптер, или же простая, но очень громкая пищалка, по звуку которой ты сможешь определить его местоположение. Настрой и заранее проверь функцию fail safe твоего полетного контроллера, которая поможет приземлиться или вернуть коптер на точку старта при потере сигнала с пульта.
Что стоит учесть при подборе всех запчастей
Исходя из предполагаемого веса полной конструкции уже FPV- , следует собрать коптер с мощными моторами. Отсюда вытекает приобретение дополнительных аккумуляторов или установка сразу более ёмких.
Для облегчения конструкции раму можно сделать самостоятельно. Варианты есть: начиная от простых деревянных линеек, заканчивая алюминиевым профилем или трубками. На этом можно сэкономить. Главное, чтобы материал был прочный, так как при падении первое, что страдает – лучи коптера.
Конечно, есть уже готовые рамы, но следует остерегаться подделок, иначе после первого же краш-теста отлетит минимум одна «нога». На время навыка управления выигрышнее подручные материалы.
Лучи для квадрокоптера имеют оптимальный параметр – 30-60 см в длину от мотора до мотора.
Чтобы не пораниться и не косить листву ближайших деревьев, а также для тестирования коптера в домашних условиях на пропеллеры можно поставить специальную защиту.
К чему будет крепиться контроллер полёта и все остальные примочки? Здесь тоже можно включить фантазию. Конечно, картонка не подойдёт, но квадрат фанеры, пластиковое основание из-под бокса для CD-дисков – оптимально. Не тяжёлое и выдержит всё то, что требуется нацепить.









Если в перспективе использование экшн-камеры, следует оставить место для приёмника и передатчика сигнала камеры на планшет и место для ее крепежа.
Моторы — их нужно сразу четыре. Для пропеллеров в основном подбираются по диаметру и мощности. Диаметр берётся от параметров рамы (если та самодельная, то на своё усмотрение).
Контроллеры управления двигателями нужны для регулировки скорости вращения лопастями. Мощность двигателей напрямую зависит от веса дрона в сборе.
Сами винты можно взять 9-12 см. Пара обыкновенных и 2 с обратным вращением. Желательно, чтобы к ним в комплекте шли крепежи сразу на несколько видов моторов.
Самое главное и самое затратное в quatrocopter – это его «мозги», а именно, контроллер полёта — на нём нельзя экономить. Здесь следует учитывать будущие возможности беспилотника. Микроконтроллер лучше брать программируемый (например, Arduino Mega). Датчики к нему можно взять «всё в одном» All In One (гироскоп, акселерометр, барометр, магнитометр), или по минимуму – гироскоп и акселерометр.
Дополнительные функции:
- GPS — программирование маршрута полёта;
- «мягкая посадка» — fail safe (если радиосвязь с пультом потеряется, то коптер плавно сядет, а не рухнет на землю);
- FPV (first person view) — вид от первого лица, а наблюдение из планшета.
Передатчик на управляющую плату стоит подбирать по карману. Главное, чтобы было не менее четырёх каналов и частота 2,4 ГГц. Его можно купить для левши или правши.
С проводами, конечно, придётся повозиться, но в умелых руках это время пройдёт быстро.
На ножки коптера или на сами лучи на раме лучше прикрепить специальную мягкую подкладку, чтобы на твёрдых поверхностях посадка была легче.
Легко не будет, но будет интересно и занимательно!
Полезные видео о том, как собрать квадрокоптер своими руками
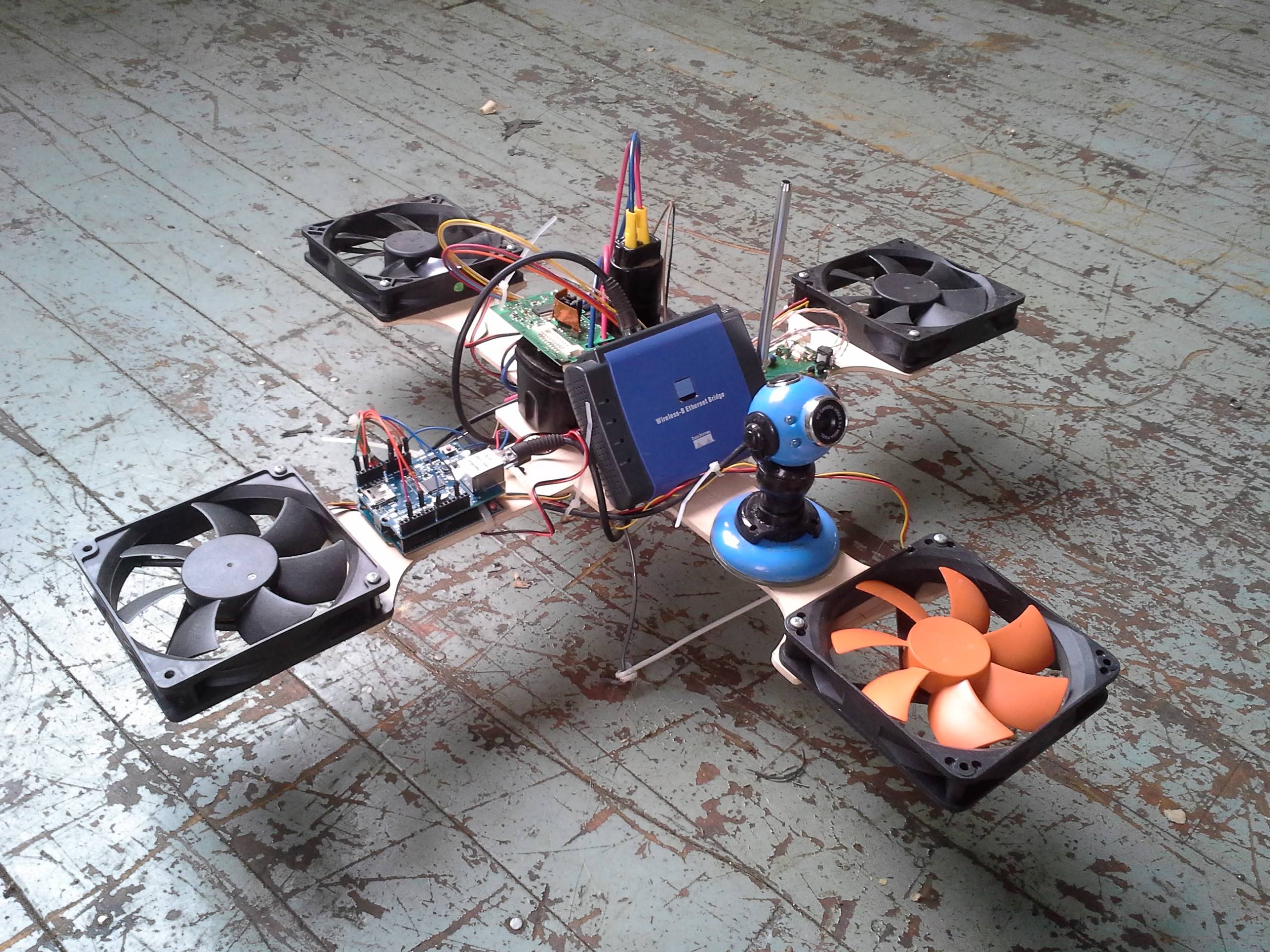
Первый квадрокоптер, как известно, появился в 2006 году. Собрали дрон германские разработчики Бускер и Бусс, причем сделали это сами. И началось: многие инженеры по всему миру загорелись идеей создания собственных моделей квадрокоптера. Есть такие умельцы и сегодня. Хотите собрать свой квадрокоптер и вы. А иначе стали бы читать сейчас этот материал?
С чего же начать чтоб сделать квадрокоптер своими руками?
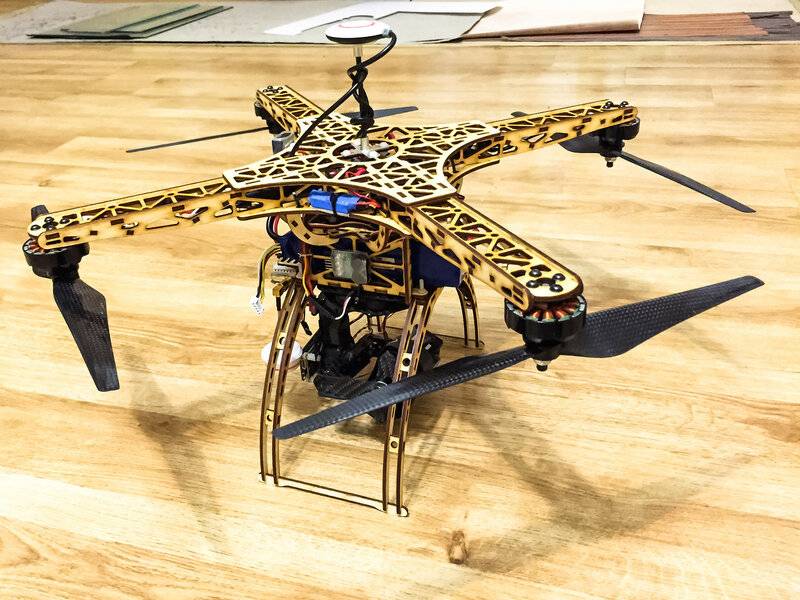
1.
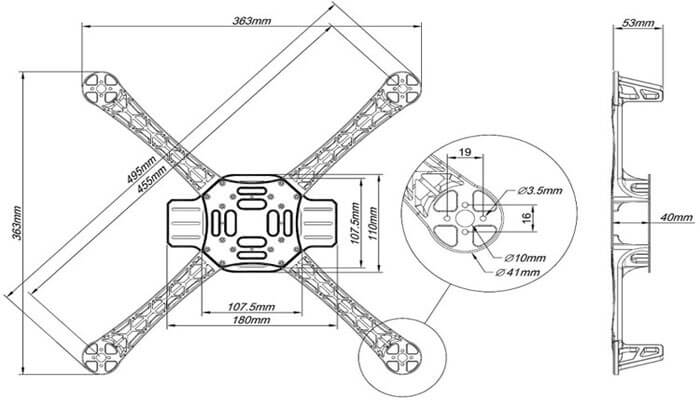
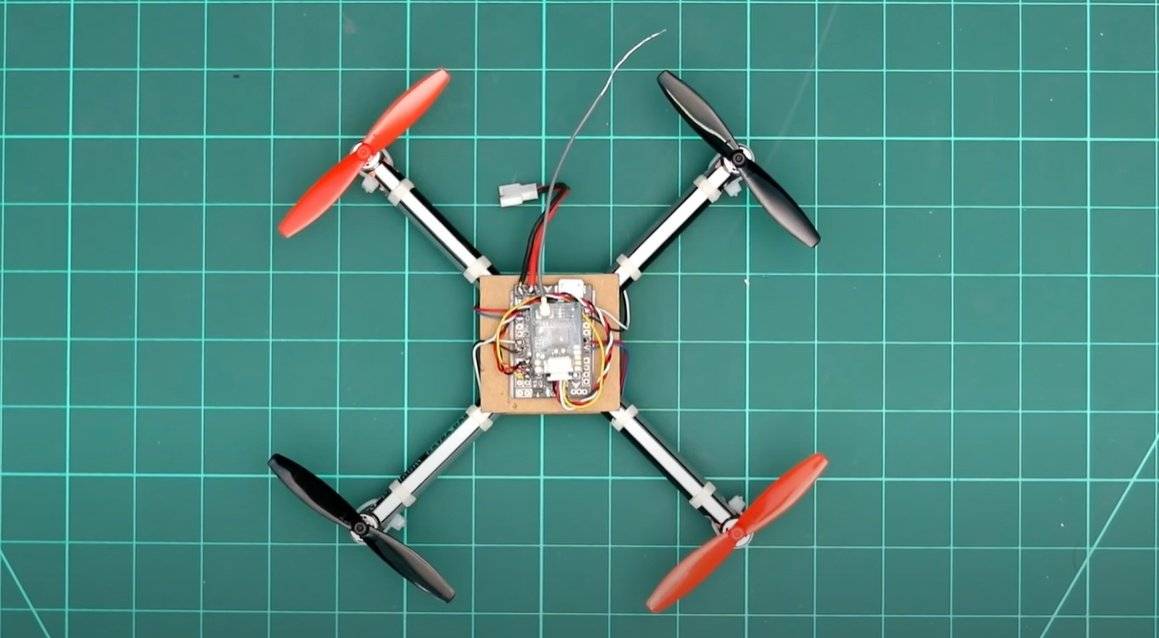
Рама. Ее можно сделать без особого труда из пластиковых труб небольшого диаметра, используемых в прокладывании канализационных и иных коммуникаций. Можно изготовить раму из куска фанеры. Понадобится квадрат 110 на 110 мм. Кроме того, потребуется алюминиевый профиль (квадратный). Лучи (длиной по 495 мм) прикрепляются винтами по обеим диагоналям получившегося квадрата. Возможна покупка готовой рамы (рис. снизу).\

2
. Далее потребуются аппаратура, допустим Turnigy 9XR
, управляющая плата и аккумулятор для аппаратуры. Плюсом к тому необходимо приобрести силовой Li — Po аккумулятор (для самого квадрокоптера), пропеллеры, устройство для подзарядки аккумуляторов.

3
. Первым делом устанавливается управляющая плата – в центральную часть платформы из получившегося куска фанеры или карбона. Делается это в пазы, непосредственно просверленные в алюминиевой основе через фанеру.
4
. Рядом с платой устанавливается приемник (можете сделать это при помощи суперклея). Далее сверлятся отверстия для крепления двигателя. При этом нужно учитывать, чтобы расстояние от края до оси во всех четырех случаях было равным.

5
. Затем необходимо сделать «паука» из проводов – от регуляторов скорости. Проводку требуется соединить параллельно с помощью соответствующих переходников. Разъемы при этом можно использовать в том месте, в котором подключается аккумулятор к «пауку».
6
. Все требуется спаять, сделать термоусадку, подключить провода (сигнальные). Для начинающих это будет большой проблемой.

7
. Можно тестировать получившийся квадрокоптер. Умельцы, которым уже доводилось успешно собирать квадрокоптеры, советуют не экономить на комплектующих. Особенно важным это замечание является сейчас, когда на рынке представлено немало различных микроприборов, в том числе контроллеров и датчиков. Каждый может использоваться при собственноручном производстве дрона, но не каждый может оправдать ожидания разработчика.
Для чего они нужны?
Гироскоп необходим для контроля углового ускорения, акселерометр замеряет гравитацию, барометр отвечает за набранную высоту, а магнитометр – за направление движения. Сегодня на рынке представлены платы, в которых есть также и GPS-принимающие.
- Первый «дрон» не должен быть с камерой для фото- или видеосъемки, он – ваша первая работа, задача которой – взлететь, уверенно держаться в создухе и не сломаться при первом же полете;
- Не гонитесь за масштабами. Лучше построить менее крупный и громоздкий, но рабочий квадрокоптер;
- Старайтесь использовать минимум соединений и дополнительных элементов. Множество датчиков и контроллеров оправдано далеко не во всех случаях,
- Если вы все же решились сделать квадрокоптер своими руками с камерой, то знайте, что для высокого качества картинки потребуется основание более крупных размеров. «Усадить» её на устройство намного сложнее, да и в целом конструкция с ним становится менее устойчивой и крепкой.
Что собой представляет квадролет
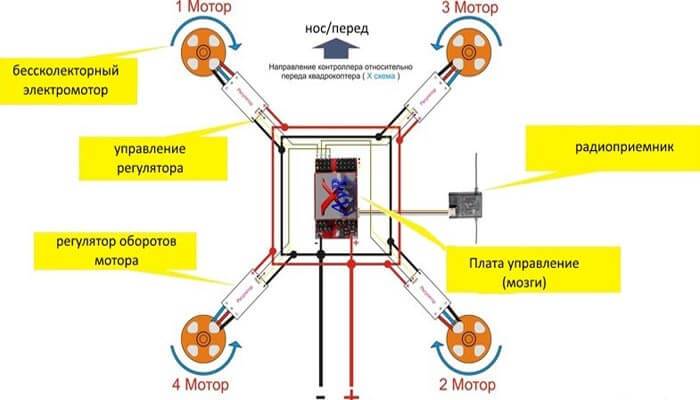
Для тех, кто пока еще не в теме — это конструкция, платформа, сооружение, летательный аппарат, кому как удобнее, которая (если мы говорим о платформе) управляется передатчиком. Имеет 4 двигателя с тем же количеством винтов. В сборке таких летательных аппаратов непременно присутствует летающая многомоторная платформа.
Когда беспилотник взлетает, он занимает горизонтальное положение. Как и вертолет, он способен зависать над поверхностью земли на разной высоте. Летает в разные стороны. Раньше коптеры умели летать только в сторону своего носа. В последние годы стали делать модели типа Headless, когда дрон во время полета мог резко полететь в любую из четырех сторон, не поворачиваясь в эту самую сторону своей носовой частью.






Коптер способен подниматься и опускаться, при этом он всегда остается в горизонтальном положении относительно земли. Если же на нем установлено специальное оборудование, то в некоторых случаях он может летать даже в режиме автопилота. Большинство авиалюбителей используют такие возможности, прежде всего, чтобы сосредоточиться в этот момент на аэросъемке, а не являть миру свое пилотажное мастерство.
Базовые узлы и компоненты
Чтобы построенный аппарат был способен подниматься в воздух хотя бы в теории, а сборка квадрокоптера своими руками доставляла удовольствие, необходимо приобрести ряд соответствующих компонентов:
Полетный контроллер – «голова» будущего БПЛА, в которой установлены все базово необходимые датчики, а также программное обеспечение для обработки их показаний, а заодно и команд, приходящих с пульта управления, контроля скорости вращения каждого двигателя. Это самый дорогой компонент, который придется покупать, чтобы собрать квадрокоптер.
Раму продвинутые моделисты делают самостоятельно из тщательно выбираемых материалов (алюминий, пластик, дерево, карбонат или их комбинации). При недостатке опыта или инженерных познаний, если проекту больше подходит готовая рама или нет ни желания, ни времени проектировать квадрокоптер и его части самому, то на помощь придут готовые рамы, производимые в широком спектре размеров.
Двигатели лучше выбрать бесколлекторные – они несколько дороже, но гораздо надежнее коллекторных. Для полетов необходимо вращение со значительной скоростью, поэтому отсутствие коллектора положительно сказывает на сроке эксплуатации. Приобретается не менее 4 (или 8, если нужен октокоптер), если бюджет позволяет, то с 1-2 запасными.
Контроллеры двигателей это платы, регулирующие скорость вращения каждого двигателя и питающие его, будут смонтированы на «лучах» корпуса
Их количество соответствует количеству двигателей.
Пропеллеры или движители следует выбирать с особым вниманием, ведь размер должны подходить к габаритам будущей рамы, независимо от того, что она самостоятельно построена или куплена.
Плата распределения питания предназначена для разводки питания с аккумулятора на контроллеры оборотов двигателей. Как правило, каждый покупной корпус снабжается небольшой платой, куда можно припаять вводы со всех котроллеров, а затем аккуратно их запитать
При желании можно заказать более продвинутый вариант основной платы питания если ваша схема квадрокоптера предполагает особенности компоновки.
Покупка аккумуляторов – один из самых непростых моментов подбора запчастей. Тип подходящего элемента питания полностью зависит от целевого назначения создаваемой модели. Для быстрых моделей лучше брать небольшие батареи с высокими показателями KV (количество оборотов в минуту × Вольт), а для тихоходных аппаратов для съемок в приоритете соотношение емкости и веса, ведь перегружать конструкцию нельзя в любом случае. Полезное дополнение – монитор заряда батареи. Не обойдется и без специального балансирующего зарядного устройства для выбранного типа аккумуляторов (литий-ионные или литий-полимерные).
Пульт управления с модулем ресивера, который подключается к полетному контроллеру, чтобы аппаратом можно было управлять. От типа пульта управления зависит комфорт управления и некоторые другие доступные функции.
Дополнительные опции выбираются в зависимости от назначения будущего аппарата. Так, на дроны для съемки часто крепят стабилизаторы камер, а гоночные невозможны без комплекса FPV (first person view, вид от первого лица).
Недостаток последнего несложно устранить в процессе сборки, благо, «высший пилотаж» владения паяльной станцией не нужен. И лучше использовать паяльники с тонким жалом.
Чертежей квадрокоптеров в полном смысле этого слова не существует, да они и не нужны. Сборка из модулей исключает подобную потребность. С расходными материалами все немного сложней. Чтобы собрать квадрокоптер своими руками понадобятся:
- Фиксатор резьбы, чтобы ни один из винтов не выкрутился от полетных вибраций.
- Термоусадочная изоляция на каждое место пайки.
- Полимерные затяжки-хомуты для фиксации элементов на корпусе.
- Гидроизолирующий состав для печатных плат.
- Коннекторы типа «банан» для двигателей.
Ничто не помешает внести необходимые правки и доработки в конструкцию в процессе сборки или летных испытаний. Может для поставленных целей лучше собрать октокоптер своими руками
При наличии внимательности и осторожности даже самые технически неграмотные любители аппаратов смогут построить летающего дрона. Более того, летные испытания в дальнейшем выявят все недостатки, которые устранятся
В результате должен получится идеальный персональный дрон. Главное – четко представлять сценарий его применения.





