
Лидер рейтинга DJI Phantom 4 PRO

Китайский квадрокоптер имеет среднюю цену в России в пределах 99 000 рублей. Продвинутые версии Phantom 4 поступили в продажу еще с ноября 2021 года. Самый лучший квадрокоптер обладает такими техническими характеристиками, как:
- Предельной высотой полета в шесть км;
- Предельной скоростью полета в 20 м/c;
- Встроенными датчиками GPS и ГЛОНАСС;
- Управлением через радиоканал;
- Функциями автопилота, следования за оператором, возвращения в точку пуска;
- Дальностью управления до 3.5 км;
- Wi-Fi;
- Аккумулятором, позволяющим совершать полеты продолжительностью до 30 мин;
- Массой 1400 г;
- В комплекте: креплением для мобильного устройства, четырьмя парами пропеллеров, аккумулятором, зарядным устройством.
Насколько точны результаты геодезических исследований с беспилотников?
Разумеется, что у геодезистов перед первым использованием беспилотников в своем рабочем процессе возникает закономерный вопрос: а насколько точна аэрофотосъемка с дрона? И вообще, какой степени точности можно добиться с помощью новых методов сбора и обработки информации, то есть с помощью беспилотных решений?
Можно ответить и очень просто: да, высокую точность с помощью беспилотников обеспечить можно, и это не составит большого труда. Но гораздо точнее будет такой ответ: беспилотные решения для геодезии могут отличаться разной степенью точности, так как это во многом зависит от требований проекта (а иногда и от правильности действий самих специалистов).
Так, например, исследование компании DroneDeploy с применением специального геодезического квадрокоптера DJI Phantom 4 RTK показало, что уровень вертикальной точности составил 2 см, а относительной горизонтальной точности 1,20 см. Многое также зависит от специфики задач и используемых летающих платформ. Так, для таких задач, как проверка роста урожая или хода строительства, достаточно высокой относительной точности. Для других задач, которые также требуют высокой абсолютной точности, существуют дроны, оснащенные возможностями кинематики в реальном времени (RTK) и кинематики постобработки (PPK). В сочетании с несколькими опорными точками можно достичь высочайшей точности в соответствии с самыми высокими требованиями. Подробнее о том, как и какими методами можно решать подобные задачи, читайте в нашей статье “Основы точности позиционирования в аэросъемке”.
Второй способ сборки квадрокоптера собственноручно
Неважно, каким способом вы будете собирать свой первый летательный аппарат, одно вам надо запомнить — не жалейте денег на детали, из которых будете собирать дрон. Только в этом случае, с большей долей вероятности, сборка получится качественной и незначительные неточности и погрешности вам будут прощены
При сборке квадрокоптера вторым способом мы рассмотрим пошаговый вариант сборки с использованием Arduino Mega, прошивки Мега-Пират.
Что потребуется для сборки? 5 моторов, включая 1 запасной. Приобретите также два комплекта лопастей — один рабочий, второй для запаса. Напоминаем вам, что там должно быть два обычных винта и два с обратным вращением. Регуляторы скорости. Их должно быть не менее четырех штук и, опять же, как минимум столько же запасных.
Советуем использовать несколько легких и маленьких. Да, дрон будет меньше летать в течение одного жизненного цикла такого мини-аккмулятора, но при этом полет у вас будет более стабильным. Тем более, что процесс замены аккумулятора не займет много времени.
Когда вы убедитесь в том, что все необходимое у вас имеется в наличии, можно смело приступать к сборке. Процесс сборки можно повторить, пользуясь первым методом, который был описан выше. Самое главное, чтобы от каждого конца луча и до центра рамы расстояние было одинаковым
Проследите за тем, чтобы пропеллеры не касались друг друга и, что важно, центральной части рамы, потому что именно там будут размещаться электронные мозги вашего дрона, плюс видеокамера, которую, кстати, можно установить по желанию
https://www.youtube.com/watch?v=SHCS2InPeCs
Если вы вмонтируете ваши датчики в резину или, скажем, в силиконовую массу, то этим самым сила вибрации во время работы пропеллеров будет погашена. В качестве шасси можно сделать и закрепить пенопласт на самых концах лучей. Для более мягкой посадки их можно прорезинить или прикрепить поролон.
Каналы
Число каналов — это количество функций летательного аппарата, которыми можно управлять.
Например: газ, направление (рысканье, курс), тангаж (он же питч, наклон вперед/назад), крен (ролл, влево/вправо), каждая функция требует отдельный канал. Как видите, для управления коптером минимально требуется 4 канала.
Для хоббийных коптеров вам определенно захочется иметь больше каналов.
Дополнительные каналы часто называют AUX, они представлены в виде тумблеров и крутилок (переменные резисторы). Вы можете использовать их для смены полетных режимов или для активации разных функций коптера.
В общем, рекомендуется иметь как минимум 5 или 6 каналов. Дополнительные 1 или 2 канала можно использовать для арминга коптера (перевода в активный режим) и для переключения полетных режимов.
Передатчики с бОльшим числом каналов (6+) обычно стоят дороже. Как правило, у них выше качество сборки и гораздо больше функций, чем у простых 4х или 5 канальных передатчиков.
Чтобы не запутаться, учтите, что в английском языке стики часто называют gimbal; что также означает и подвес камеры — camera gimbal, не перепутайте.
Пошаговая инструкция по сборке
Давайте условимся на том, что ты прочитал нашу статью про выбор набора для сборки квадрокоптера ,и воспользовался ценнейшем советом – брать раму с платой распределения. Если нет, то провода подключаем сразу к модулю управления.

Для примера рассмотрим сборку из следующих комплектующих:
- Каркас квадрокоптера Diatone Q450 Quad 450 V3 PCB Quadcopter Frame Kit 450mm
- Мотор DYS D2822-14 1450KV Brushless Motor. 4 штуки
- Регулятор DYS 30A 2-4S Brushless Speed Controller ESC Simonk Firmware
- Пропеллеры DYS E-Prop 8×6 8060 SF ABS Slow Fly Propeller Blade For RC Airplane
- Модуль управления квадрокоптером KK2.1.5 kk21evo
- Аккумуляторная батарея литий-полимерного типа Turnigy nano-tech 2200mah 4S ~90C Lipo Pack
- Устройство для зарядки аккумуляторов Hobby King Variable6S 50W 5A
- Коннектор для подключения аккумулятора XT60 Male Plug 12AWG 10cm With Wire
- Коннекторы 20 Pairs 3.5mm Bullet Connector Banana Plug For RC Battery / Motor
- Пульт управления квадрокоптером Spektrum DX6 V2 with AR610 Receiver (в комплекте с приёмником и передатчиком)
Размазываем компоненты по столу ровным слоем, и начинаем.
Этап первый. Сборка

Примерно прикидываешь необходимую длину проводов контроллера, прибавляешь небольшой запас «на криворукость» и обрезаешь их до нужной длины
Припаиваешь коннекторы к выходам регуляторов, чтобы потом проще было подключать моторы
Припаиваешь регуляторы к плате разводки
Припаиваешь коннектор аккумуляторного блока к плате разводки
Прикручиваешь двигатели на лучи коптера. При установке моторов постарайся не сорвать резьбу
Если коннекторов на двигателях нет, то припаиваешь и их
Привинчиваешь лучи с двигателями к плате
Крепишь регуляторы к лучам дрона
Не важно чем, но удобнее всего пластиковыми хомутами
Подключаем провода регуляторов к двигателям в произвольном порядке. Если будет нужно – потом изменим
Закрепляешь на корпусе модуль управления (предварительно сфотографировав тыльную часть
Пригодится). Снова хоть на жвачку, но советую пока использовать мягкий двухсторонний скотч
Подключаешь регуляторы оборотов к контроллеру. В те порты, которые отмечены (+ — пусто), обычно подключается белым проводом к экрану
Остатками скотча закрепляешь приёмник как можно ближе к блоку управления, и подключаешь нужные каналы к нужным портам. Используй документацию своего приёмника и фото тыльной стороны платы, чтобы разобраться какая пачка проводов за что отвечает
Подключишь питание устройства от батареи, через коннектор
Profit! Ты собрал свой квадрокоптер










Этап второй. Отладка

- Запускаешь двигатели (тут обычно всё по-разному, так что снова смотри документацию)
- Немного прибавляешь газ, и смотришь в какую сторону вращаются пропеллеры. Они должны вращаться так, как указано в схеме, которая прилагается к контроллеру. Иначе управление будет инвертироваться. Если что-то не так, то просто переворачиваешь коннектор, который соединяет двигатель и контроллер
- Когда всё вращается правильно – прикручиваешь верхнюю деталь рамы. Не заталкивай её на своё место. Если она встаёт туго, значит что-то пошло не так. Ослабь нижние винтики, а после установки затяни всё равномерно
- Закрепляешь блок с аккумуляторами
- Монтируешь адаптеры для пропеллеров на моторы
- Устанавливаешь пропеллеры, учитывая направление вращения моторов. Приподнятая часть лопасти должна смотреть в направлении вращения
- Готово.Твой коптер готов пережить первое включение!
Это был один из простейших примеров, с которого стоит начать. Конечно, если ты хочешь использовать камеру, GPS или более сложный контроллер, то конструкция будет сложнее. Поэтому, если вы не уверены в своих силах, то стоит начать с малого. Всё остальное можно прикрутить потом.
Как управлять квадрокоптером
Управление квадрокоптером будет легко даваться даже ребенку. Если уж ребенок способен разобраться с этим, то взрослый – тем более. О том, как управлять квадрокоптером, сейчас будет разбираться подробнее. В принципе, все управление осуществляется пультом. На нем имеется два рычага, один из них позволяет осуществлять взлет и снижение квадрокоптера (более подробно о данных принципах работы было рассказано выше), другой отвечает за осуществление поворотов и полетов в стороны: влево и вправо.
Эта функция поможет в том случае, если вдруг у пульта сядут батарейки или с ним еще что-нибудь случиться. Поэтому лучше выбирать квадрокоптер именно с GPS-навигаторами. С ним Вам не придется беспокоиться о том, что весьма недешевый аппарат улетит и где-нибудь затеряется. Квадрокоптеры с усовершенствованным внутренним наполнением, способены достигать немысленных скоростей и совершать при этом различные маневры.
Управление квадрокоптером
Новичок на этапе обучения может столкнуться с некоторыми трудностями контроля. В основном они связаны с пространственной ориентацией аппаратика и координацией движений стиков, что, надо сказать, по началу действительно очень непривычно.
Однако для таких случаев многие производители (в частности бюджетных модификаций) предусмотрели такую полезную функцию, как Headless Mode. Она меняет ориентацию дрона таким образом, что пилоту не нужно задумываться о том, где у квадрона зад, а где перед.
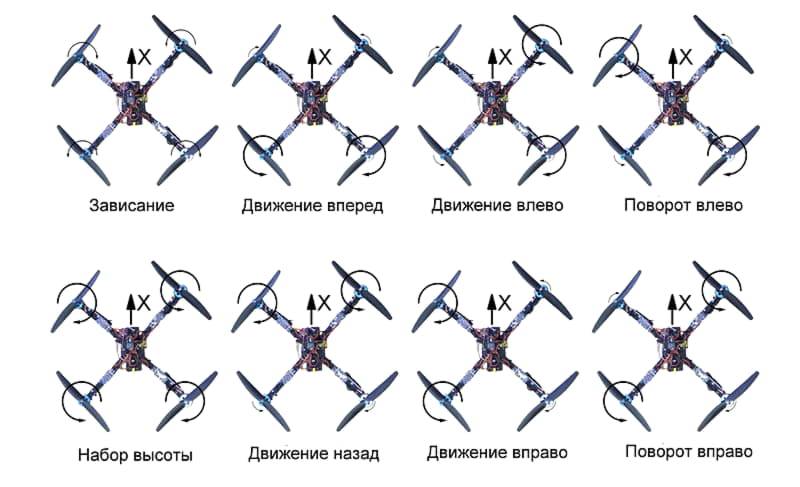
Управление перемещением квадрокоптера
Структурная схема коптера фактически продиктована особенностями управления полетом. Например, моторы обязательно должны попарно вращаться навстречу друг другу. В противном случае платформа начнет закручиваться. Становится очевидна необходимость использования полетного контроллера. Когда оператор двигает стик газа вверх происходит одновременное увеличение оборотов всех двигателей.
Для работы с беспилотником чаще всего используется портативный пульт. Эти приборы бывают разных форм и размеров, но они всегда имеют два рычага (стика), которыми задается скорость и направление перемещения БПЛА. Поведение коптера в воздухе можно отрегулировать особыми клавишами пульта – триммерами. Особенности управления написаны в этой статье. Ниже, мы перечислим варианты управления.
Для чего нужен квадрокоптер
Активное развитие и внедрение коптеров в гражданскую среду, привели к росту вариантов использования:
- Пассажирские перевозки — так, в Дубаи, на международном саммите была продемонстрирована модель беспилотного такси Ehang 184, которое может находиться в воздухе около 30 минут за один полёт. По сути это одноместный восьми-роторный аппарат, который лишен каких-либо органов управления, т.е. фактически человек летит в этом аппарате в качестве пассажира, а не пилота. В небольшой кабине располагается кресло и планшет с сенсорным экраном, используя который вы можете указать пункт назначения. В 2018 году первый тестовый полет совершило аэро-такси Vahana компании Airbus. В феврале этого же года, сообщили о секретном аэро-такси Joby Aviation, стартап проекта уже привлек 100 млн долларов.
- Хозяйственная деятельность — дроны берут на себя отдельные функции авиации: проведение аэросъёмки или других видов сбора данных, нужных для сельского хозяйства, контроля ситуаций на дорогах и в любых удалённых участках. С их помощью отслеживают пути миграции животных, находят затерявшиеся суда, выявляют уровень гидрометеорологической опасности, проводят обследование линий электропередач.
- Развлекательные / спортивные шоу — такие аппараты чаще всего оснащаются несущими винтами и являются подобием вертолётов, а не самолётов. Данная конструкция наиболее рациональная, поскольку не требует наличия взлётно-посадочной полосы. Развлекательное использование БПЛА недавно расширилось воздушными гонками. Чаще всего для них используются модели самостоятельной сборки или существенно переработанные готовые. В результате они получают возможность набирать скорость выше 150 км/ч, но относятся к аппаратам с малыми габаритами. Отметим, что стартап Alauda Racing запустил на платформе Kickstarter сбор средств на первые в мире гонки на пилотируемых мультикоптерах, которые планируются в 2021 году.
- Профессиональная или любительская фотосъемка — все современные модели оснащаются высококачественной камерой и позволяют делать восхитительные снимки там, куда человек не смог бы никогда добраться самостоятельно.
- Грузовые перевозки — в 2021 году компания Amazon провела испытания по доставке посылок с помощью коптера и подала заявку на технологию доставки груза при помощи парашюта. В последние месяцы активно появляются новости с концептами больших грузовых беспилотников, способных перемещаться на высоких скоростях и перевозить до нескольких тонн. Как, например, модель Draco-2 компании Sabrewing Aircraft и тестовая сборка компании Boeing.
DCIM101MEDIADJI_0893.JPG
Подборки лучших дронов (квадрокоптеров) в разных ценовых диапазонах
Прежде чем сделать выбор и купить конкретную модель, рекомендуем ознакомиться с квадрокоптерами в разных ценовых категориях.
Ниже представлены ссылки на подборки дронов (квадрокоптеров) не выше определенной стоимости:
- Лучшие квадрокоптеры от 500 до 900 руб.
- Лучшие квадрокоптеры до 1000 руб.
- Лучшие квадрокоптеры до 1500 руб.
- Лучшие квадрокоптеры до 2000 руб.
- Лучшие квадрокоптеры до 2500 руб.
- Лучшие квадрокоптеры до 3000 руб.
- Лучшие квадрокоптеры до 4000 руб.
- Лучшие квадрокоптеры до 5000 руб.
- Лучшие квадрокоптеры до 6000 руб.
- Лучшие квадрокоптеры до 7000 руб.
- Лучшие квадрокоптеры до 8000 руб.
- Лучшие квадрокоптеры до 9000 руб.
- Лучшие квадрокоптеры до 10000 руб.
- Лучшие квадрокоптеры до 12000 руб.
- Лучшие квадрокоптеры до 15000 руб.
- Лучшие квадрокоптеры до 20000 руб.
- Лучшие квадрокоптеры до 30000 руб.
- Лучшие квадрокоптеры до 50000 руб.
- Лучшие квадрокоптеры до 100000 руб.
- Лучшие квадрокоптеры до 200000 руб.
- Лучшие квадрокоптеры до 1000000 руб.
Устройство и принцип работы
Как мы говорили ранее, система является мультироторной. Эти самые роторы создают мощное диагональное вращение в противоположных направлениях. У роторов имеется так называемый управленец, собирающий информацию с трех или с шести гироскопов (количество последних зависит от конфигурации коптера) и передает ее роторам.
Гироскопы были созданы для того, чтобы автоматически определять положение аппарата во время полета и затем фиксировать его во всех трех плоскостях. При этом акселерометр делает так, чтобы коптер занял идеальное положение по горизонтали. Чтобы закрепить квадрокоптер на определенной высоте, полетная система оборудуется бародатчиком.
Итак, общее представление о деталях и модулях будущего квадрокоптера уже сложилось, теперь настала пора поделиться с вами тем, как же собрать дрон собственноручно.
Первое, что приходит на ум при сборке собственного квадрика, конечно же, его рама. Ничего сложного с этим элементом нет. Для ее основы сойдет обычная фанера размером 15 квадратных сантиметров. Лучи приспособляются с помощью винтов по диагональной разметке вашей рамы. Луч должен быть 30 сантиметровой длины, начиная от центра коптера. Балки — 25 см. Дырки для самих двигателей отложим на конец создания корпуса, предварительно сделав разметку по движкам.
Принцип действия современных коптеров предельно прост. Каждый несущий винт приводится в движение электромотором. Одна часть двигателей вращается по часовой стрелке, а вторая – против. Это позволило исключить из конструкции квада хвостовой винт и сложный в плане конструктивной реализации автомат перекоса.
Наверняка, вы прочитали эту статью и взяли раму с платой распределения. Но если вы это не сделали – не беда, просто подключите провода к модулю управления.
Возьмём, к примеру, коптер, собранный из таких комплектующих:
- Основа (каркас) – Diatone Q450 Quad 450 V3 PCB Quadcopter Frame Kit 450
- 4 мотора DYS D2822-14 1450KV Brushless Motor.
- Регулятор оборотов DYS 30A 2-4S Brushless Speed Controller ESC Simonk Firmware
- Пропеллеры DYS E-Prop 8×6 8060 SF ABS Slow Fly Propeller Blade For RC Airplane
- Модуль управления 1.5 kk21evo
- АКБ, тип: литий-полимер — Turnigy nano-tech 2200mah 4S ~90C Lipo Pack
- Зарядное устройство Hobby King Variable6S 50W 5A
- Аккумуляторный коннектор XT60 Male Plug 12AWG 10cm With Wire
- Коннекторы 20 Pairs 3.5мм Bullet Connector Banana Plug For RC Battery / Motor
- Пульт управления Spektrum DX6 V2 with AR610 Receiver (с приёмником и передатчиком)
Всё это обойдётся где-то в 20 тысяч рублей
MultiWii
Следующей вехой в развитии коптеров стала система MultiWii. Название пошло от игрового манипулятора Nintendo Wii и Wii Nunchuk, которые умельцы разбирали, и выпиливали оттуда плату с датчиками. В качестве центрального процессора использовалась Arduino Nano. Внешний вид платы получался примерно такой (фото с сайта rcgroups, 2010 год):
Впрочем, за несколько лет система эволюционировала, и последние платы (они продаются и сейчас, цена вопроса 20-30$) выглядят где-то так:
(фото с сайта Hobbyking.com)
Последние версии MultiWii имеют вполне неплохие датчики, умеют зависать в точке по GPS, удерживать высоту и возвращаться домой. Т.к. Multiwii был написан для Arduino, все платы так и остались Arduino-совместимыми, исходный код можно скачать на Github. Одним из недостатков MultiWii является слабый процессор, что ограничивает вычислительные возможности алгоритмов, позже стали появляться клоны на STM32, однако погоды они не сделали, т.к. в плане «железа» любой квадрокоптер достаточно прост, 95% сложности заключается именно в коде. В то же время, я уверен что именно исходники MultiWii стали основой всех сегодняшних коммерческих систем.
Какие у квадрокоптера есть датчики
- Акселерометр: помогает мультикоптеру стабилизироваться горизонтально относительно земли. Например, если подует сильный порыв ветра, то акселерометр моментально даст команду на выравнивание дрона относительно силы порыва.
- Гироскоп: определяет скорость, с которым вращается устройство и тоже помогает стабилизировать дрон в воздухе.
- Барометр: измеряет текущее давление воздуха, поэтому может определять высоту зависания мультикоптера и держать его на заданной отметке.
- Датчик оптического потока: это небольшая камера, которая визуально следит за обстановкой под днищем дрона, служит для повышенной стабилизации в воздухе.
- Сонар или ультразвуковой датчик: определяет препятствия под или перед дроном, помогает совершать посадку.
- Инфракрасный датчик: тоже помогает определять препятствия перед мультикоптером.
- Модуль GPS: позиционирует дрон в пространстве. Обычно требуется не менее 8 спутников для минимального качества обнаружения дрона в пространстве с помощью спутников.
Могут быть еще некоторые, но это основные, которые можно встретить на большинстве профессиональных мультикоптеров.
Будущее дронов
На что еще способны и для чего нужны людям коптеры, кроме развлечений?
Уже сегодня довольно успешно применяются такие летательные аппаратики для помощи строительным бригадам при монтаже сложных, композиционных конструкций, в сельском хозяйстве, при съемках документальных фильмов формата BBC, и даже для транспортировки людей.










Надеемся, статья оказалась полезной и познавательной для вас. Если так, подпишитесь на наши обзоры и расскажите о них друзьям/знакомым в соцсетях. Удачного освоения ваших первых беспилотников!
Что собой представляет квадролет
Для тех, кто пока еще не в теме — это конструкция, платформа, сооружение, летательный аппарат, кому как удобнее, которая (если мы говорим о платформе) управляется передатчиком. Имеет 4 двигателя с тем же количеством винтов. В сборке таких летательных аппаратов непременно присутствует летающая многомоторная платформа.
Когда беспилотник взлетает, он занимает горизонтальное положение. Как и вертолет, он способен зависать над поверхностью земли на разной высоте. Летает в разные стороны. Раньше коптеры умели летать только в сторону своего носа. В последние годы стали делать модели типа Headless, когда дрон во время полета мог резко полететь в любую из четырех сторон, не поворачиваясь в эту самую сторону своей носовой частью.
Коптер способен подниматься и опускаться, при этом он всегда остается в горизонтальном положении относительно земли. Если же на нем установлено специальное оборудование, то в некоторых случаях он может летать даже в режиме автопилота. Большинство авиалюбителей используют такие возможности, прежде всего, чтобы сосредоточиться в этот момент на аэросъемке, а не являть миру свое пилотажное мастерство.
Из каких элементов состоят квадрокоптеры?
Концептуально радиоуправляемый коптер состоит из двигателей, регуляторов оборотов, лопастей, рамы, полетного контроллера, батареи, радиоприемника и передатчика. На самом деле в нем гораздо больше модулей, о которых мы поговорим чуть ниже.
Полетный контроллер — это мозг вашего аппарата, именно он отвечает за поведение в полете. Как правило, полетный контроллер представляет собой плату или небольшую коробочку с микросхемой внутри.
Современные полетные контроллеры, это сложные устройства, способные обрабатывать сигналы поступающие со множества различных устройств и самостоятельно принимать решения о выборе наиболее оптимальной траектории полета, а также избегать столкновения с препятствиями. Такие контроллеры установлены на DJI Mavic Pro и DJI Spark.
Как правило полетный контроллер состоит из четырех базовых датчиков:
- Акселерометр или датчик угловых скоростей;
- Гироскоп;
- Магнитометр или компас;
- Барометр — датчик атмосферного давления, который помогает удерживать высоту.
Управление осуществляется через радиопередатчик, он же пульт управления. Большинство передатчиков работают на частоте 2,4 ГГц, это своеобразный стандарт. Команды с передатчика поступают на радиоприемник который подключен к полетному контроллеру. Полетный контроллер обрабатывает полученный радиоприемником сигнал и передает команды двигателям. Таким образом можно сказать, что полетный контроллер управляет вращением двигателей, но делает это не напрямую, а через регулятор оборотов или ESC (Electric speed controller — электронный контроллер скорости).
Пульт управления квадрокоптером DJI Mavic Air Fly More Combo
В самом общем случае управляется коптер по 4-м каналам, которые как раз и есть упомянутые нами выше тангаж (pitch), крен (roll), рыскание (yaw) и газ (Throttle). Чтобы понять, как управляется дрон читайте основы управления квадрокоптером.
Познакомьтесь также с простейшей схемой устройства современного квадрокоптера:
Модули квадрокоптеров
Принцип действия квадрокоптера
Давайте разберемся с принципом действия подробнее. Квадрокоптер – это аэродинамически абсолютно нестабильный аппарат. Стабильным его полет делает бортовой компьютер или полетный контроллер. Для того, чтобы дрон накренился, необходимо, чтобы два двигателя замедлили вращение, а два противоположных – наоборот увеличили.
Например, если аппарат хочет свернуть влево, он ускоряет два двигателя на правой стороне рамы и замедляет два на левой стороне. Точно так же, если он хочет полететь вперед он ускоряет задние два мотора и замедляет два передних.
Коптер может повернуть (так называемое “рыскание”) влево или вправо, ускоряя два двигателя, которые расположены по диагонали друг к другу, одновременно замедляя два других. Для перемещения доступны 3 оси – тангаж (pitch), крен (roll), рыскание (yaw). А также газ (Throttle).
Как перемещается квадрокоптер (принцип работы)
Полезное видео на тему: «Принцип работы квадрокоптера»
Что такое квадрокоптер?
Итак, если говорить коротко и просто, то можно охарактеризовать квадрокоптер так: беспилотный летательный агрегат с четырьмя винтами на радиоуправлении. Можно охарактеризовать его и более подробно, затронув при этом историю, так как думаю, что многим будет интересно, когда и для чего было придумано это устройство. Квадрокоптер, который иногда именуют «дрон» или «коптер» (также квадрокоптер имеет название квадролет) — это летательное устройство с роторами, общее количество которых — четыре. Роторы вращаются противоположно в диагональном направлении. В переводе с английского языка слово quadrocopter — это четырехроторный вертолет. Обобщенно устройства данного и подобного вида (с произвольным количеством имеющихся роторов) называют мультикоптерами.
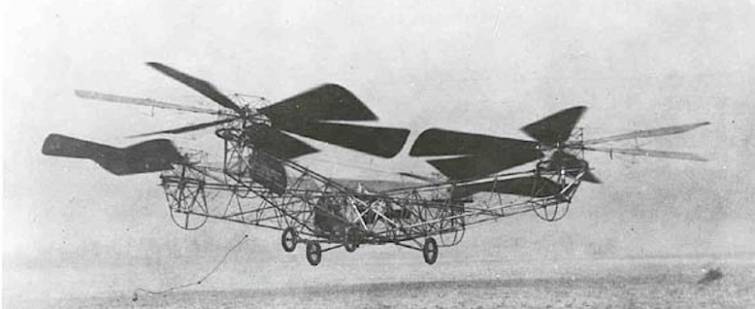
Многовинтовые подобного типа вертолеты конструировались еще тогда, когда вертолетостроение еще только зарождалось. Попытки запускать такие аппараты были осложнены механизмами осуществления движения, которые от одного мотора передавали вращение на винты. Вскоре был изобретен хвостовой винт и механизм, управляющий несущим винтом — автоматом перекоса. Недостатком этих аппаратов была сложная трансмиссия, передававшая вращение одного мотора на несколько винтов. Изобретение хвостового винта и механизма, управляющий несущим винтом вертолета поставило на некоторое время точку на попытках запуска аппарата с произвольным количеством винтов. Попытки возобновились приблизительно в пятидесятые годы.
Как работает и летает квадрокоптер
Принцип работы квадрокоптера довольно простой. Двигатели в количестве четырех штук и более, расположенные на лучах рамы аппарата, создают при включении подъемную силу, и дрон отрывается от земли. Режимов действия у моторов предусмотрено несколько:
- одновременный запуск всех двигателей — непосредственно для взлета;
- наклон в стороны — скорость вращения левой или правой пары моторов при этом меняется;
- снижение оборотов двигателей для уменьшения подъемной силы, в таком режиме дрон идет на посадку;
- набор скорости достигается за счет изменения вращения задней или передней пары моторов.
В целом схема устройства дрона очень похожа на вертолетную. Но если большая летательная машина маневрирует за счет наклона вала лопастей, то коптер изменяет положение в пространстве благодаря разнице воздушных потоков по бокам. Для вращения на месте нужно уменьшить обороты одной из пар двигателей, в таком случае возникнет обратный момент, и вся конструкция сможет закрутиться вокруг оси.
Чем меньше лопастей у винтов дрона, тем он быстрее
Как работает квадрокоптер с камерой
Наибольший интерес представляют дроны со встроенной или подвесной камерой, их возможности самые широкие. По внутреннему устройству такие аппараты практически не отличаются от простейших моделей. Разница состоит в том, что в основном блоке на силовой раме предусмотрен еще и небольшой видеодатчик либо крепления для фиксации внешней фототехники.
Камеры дронов из разных ценовых категорий отличаются по возможностям. Речь идет не только о качестве изображения, но и о функционале. Например, дорогие камеры оснащаются настраиваемым фокусом, а также поворотным механизмом. Их можно направлять в разные стороны, при этом не меняя положение самого дрона в пространстве.
Передавать видео и фото в реальном времени дроны могут на небольшое расстояние до 1 км
Бюджетные коптеры с камерой отправляют фото и видео непосредственно на мобильное устройство оператора. Более дорогие модели поддерживают карты памяти, позволяющие не только сохранять изображения, но и программировать маршрут и схему поведения дрона.










Совет! Если нужен квадрокоптер с камерой для проведения профессиональной съемки, лучше выбирать устройство с внешней фототехникой на подвесе.
На какой частоте работает квадрокоптер
Почти все дроны поддерживают управление через радиопульт. Существует несколько типов передатчиков и приемников и основных частот:
- 900 Мгц. Дрон не сможет улететь далеко т владельца, но при этом сигнал без затруднений пройдет через препятствия на коротких расстояниях. Связь не потеряется, если между оператором и коптером окажутся деревья.
- 1,2 Ггц. Такие дроны предназначены для полетов на длинные дистанции. Сигнал также легко проходит через препятствия и твердые предметы, антенна на пульте в случае поломки легко поддается ремонту и замене.
- 2,4 Ггц. Через плотные объекты сигнал проходит плохо — связь может прерываться. Но при этом отпускать дрон можно на расстояние около 1 км и больше. Главное, проводить полеты на открытой местности без близко расположенных строений и деревьев.
Как правило, при покупке коптера приходится выбирать между дальностью и качеством сигнала. Чем шире радиус действия дрона, тем выше вероятность, что связь с ним прервется при возникновении на пути каких-либо препятствий.
Как устроен и из чего состоит квадрокоптер
Основной частью конструкции квадрокоптера является силовая рама — на ней закреплены все остальные элементы. В центре расположен корпус дрона с электронной начинкой и камерой. От середины отходят фиксированные или поворотные лучи с зафиксированными на них двигателями. Снизу располагаются ноги или полозья, металлические, как у вертолета, или резиновые, представляющие собой простые накладки.
Многие модели дронов оснащены подсветкой для вечернего времени суток
Важно! Рама дрона выполняет не только практические, но и декоративные функции. Поэтому судить по ее форме и размерам об электронной начинке коптера нельзя.. Внутри корпуса расположены электронные элементы, отвечающие непосредственно за летательные возможности
Среди них:
Внутри корпуса расположены электронные элементы, отвечающие непосредственно за летательные возможности. Среди них:
- литий-ионная батарея, предоставляющая дрону энергию;
- радиомодули и трансмиттеры для поддержки дистанционного управления;
- преобразователи напряжения;
- микросхемы и провода;
- датчики — гироскоп, акселерометр, сонар, GPS.
Набор сенсоров может меняться в зависимости от модели дрона и его стоимости. Большинство устройств оснащаются гироскопом, он отвечает за стабилизацию коптера в полете и его крен, позволяет удерживать высоту.
Модуль спутниковой навигации (GPS, ГЛОНАСС, Бэйдоу).
Многие современные беспилотники оснащаются модулями спутниковой навигации. Чаще всего это модуль GPS, однако на многих последних дронах от DJI можно встретить двойную систему навигации, которая может включать комбинации GPS и ГЛОНАСС или же GPS и Бэйдоу. В зависимости от установленной комбинации такой беспилотник может эффективно эксплуатироваться в тех или иных регионах мира. Примером может быть серия промышленных беспилотников DJI Matrice 200.
Модуль (или комбинация модулей) спутниковой навигации обеспечивает бортовой компьютер дрона данными о местонахождении аппарата (долгота, широта и высота). Подобная, достаточно сложная, система навигации необходима прежде всего специализированным беспилотникам, которые выполняют полеты на большие расстояния и/или выполняют достаточно сложные задачи в области безопасности, военные задачи или работают в сфере промышленности.
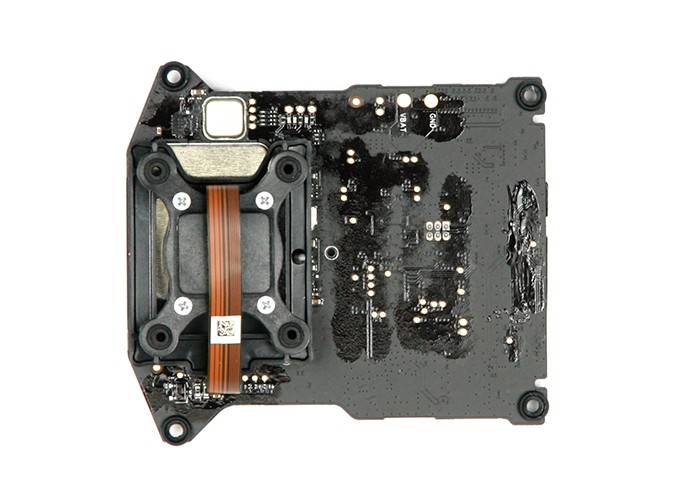 Модуль GPS и плата IMU для DJI Mavic 2 Pro/Zoom
Модуль GPS и плата IMU для DJI Mavic 2 Pro/Zoom
Однако задачи модуля спутниковой навигации вышеописанными не ограничиваются. С его помощью летательный аппарат не только ориентируется в пространстве во время полета, но и может в автоматическом режиме точно приземлиться на “базу”, даже если его визуальные датчики и штатная камера не работают, а связь с пультом дистанционного управления утеряна. Таким образом, модуль спутниковой навигации поможет обеспечить безопасность полета.