
Сборка робота-пылесоса
Подготовив все необходимое можно приступать к сборке. Она заключается в прохождении вышеописанных этапов.
- Создаем корпус цилиндрической формы из картона либо поливинилхлорида: диаметр – 30 см, высота – 9 см, толщина стенок – 0,6 см. Дно лучше вырезать из фанеры.
Закрепляем на корпусе поливинилхлоридный бампер при помощи скотча, предварительно установив в него датчики инфракрасные и реагирующие на удар.
- Изготавливаем из картона или поливинилхлорида отсек для мусора с крышкой, закрепляемой магнитами.
- Делаем фильтр из тканевых салфеток.
- Делаем турбину из поливинилхлорида и компьютерных дисков, устанавливаем.
- Подключаем датчики к контроллеру: обычный рабочий режим соответствует логической единице, а срабатывание – нулю.
- Двигатель передней щетки подключаем к arduino mega 2560 через транзистор mosfet, что обеспечивает быстрое ее вращение по углам и довольно медленное по основной площади комнаты.
- Устанавливаем 4 аккумулятора (соединяем их попарно, каждую пару — последовательно) и зарядное устройство, подключаем их.
Монтируем щетки, изготовленные самостоятельно из лески, и колеса (купленные либо снятые с подходящей игрушки) на дно.
- Устанавливаем на arduino необходимые программы при помощи компьютера, которые можно найти в сети интернет.
- Проверяем закрепление всех компонентов к дну и стенкам корпуса.
- Вырезаем из картона или поливинилхлорида крышку, закрепляем ее саморезами.
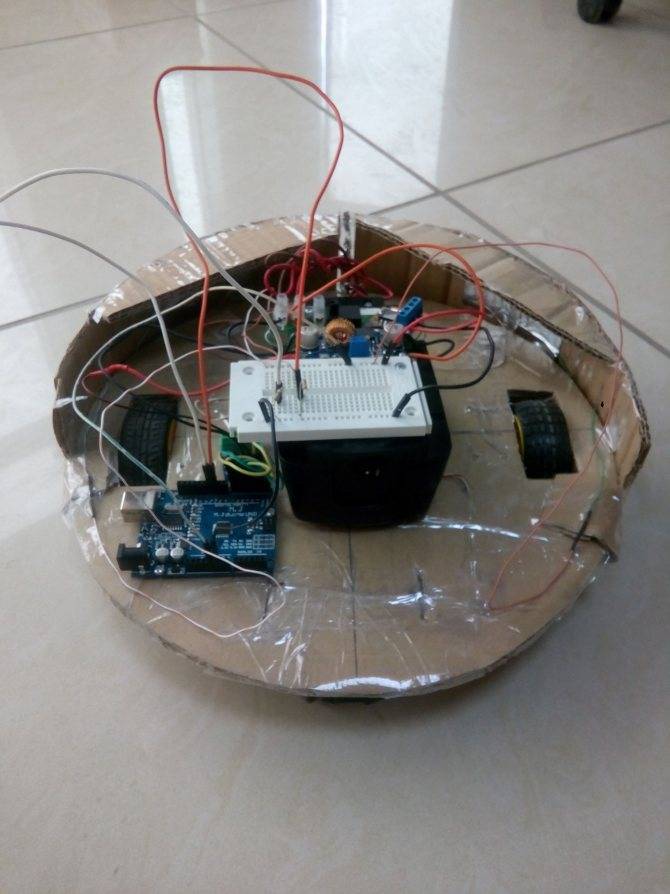
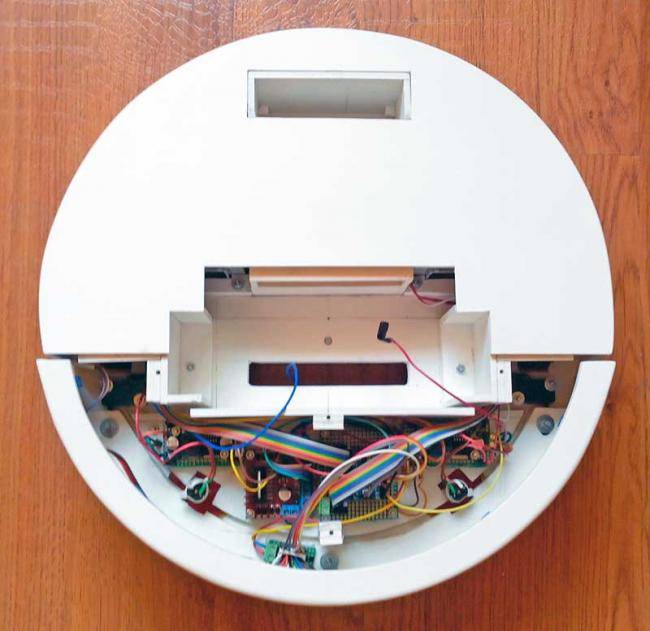
Все детали закрепляются на имеющиеся для этих целей у них разъемы саморезами либо клеем, скотчем. Полученный результат представлен на фотографии:

Робот пылесос — Часть1: Механика
Наверное, каждый, кто только начинает по-настоящему увлекаться робототехникой, электроникой или программирование, проходя сложный путь изучения сопутствующих технологий, надеется в будущем применить накопленные знания для работы над серьёзным и интересным проектом.
Я вот, например, почитав робофорум , решил собрать робот пылесос. Причина такого выбора не столько в полезности данного устройства, сколько в том что, разрабатывая его, можно сконцентрироваться на конкретной задаче: робот способный автономно убирать мусор при минимальном обслуживании.
Данная статья не является подробным описанием по сборке и настройке робота. В ней я, главным образом, хотел бы изложить свой опыт, полученный во время выполнения данной работы.
Механика: Из всей механики робота пылесоса особую сложность в проектировании и изготовлении представляет мусороуборочный узел.
Он должен: -Занимать как можно меньше места, но при этом иметь вместительный контейнер для мусора. -Хорошо убирать загрязнения на любых поверхностях, но при этом обладать низким энергопотреблением и уровнем шума.
Прежде чем удалось добиться выполнения всех этих запросов, было перепробовано множество различных вариаций компоновки узла.
Макеты мусороуборочных узлов.
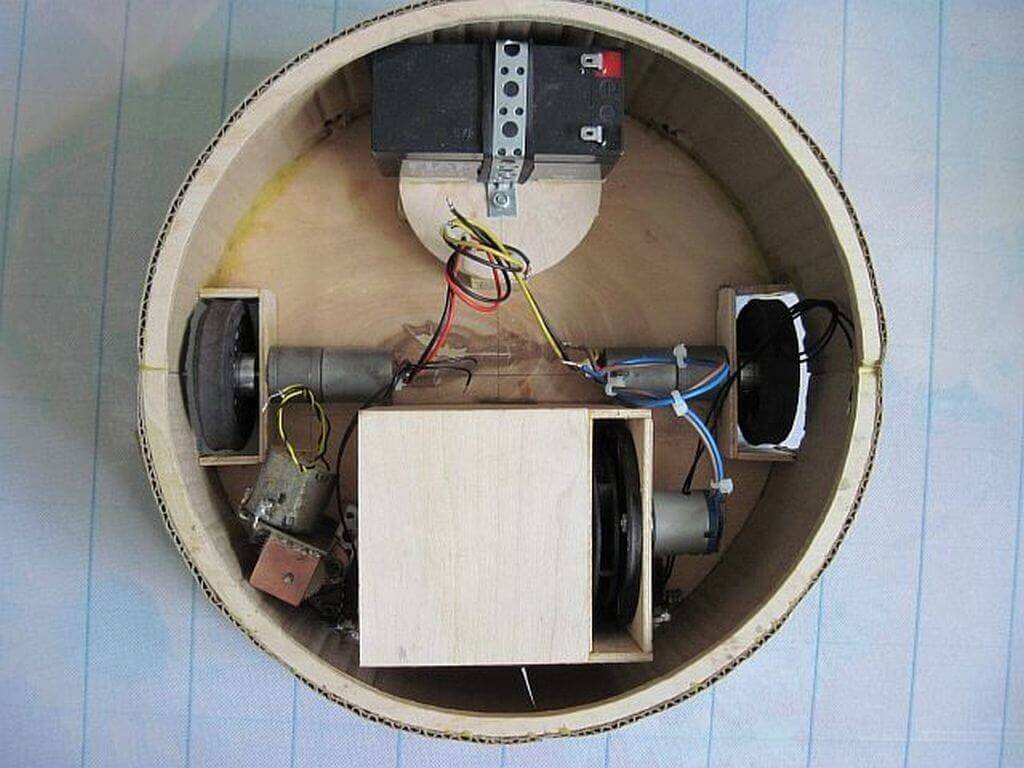
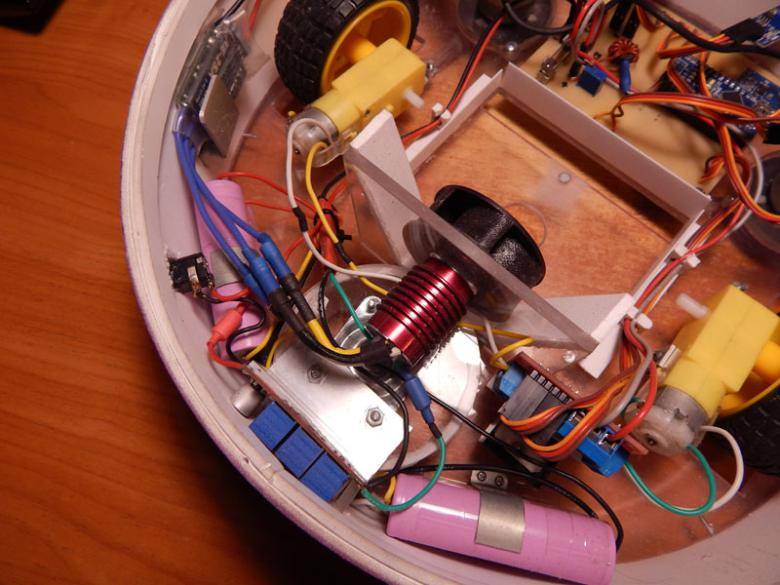
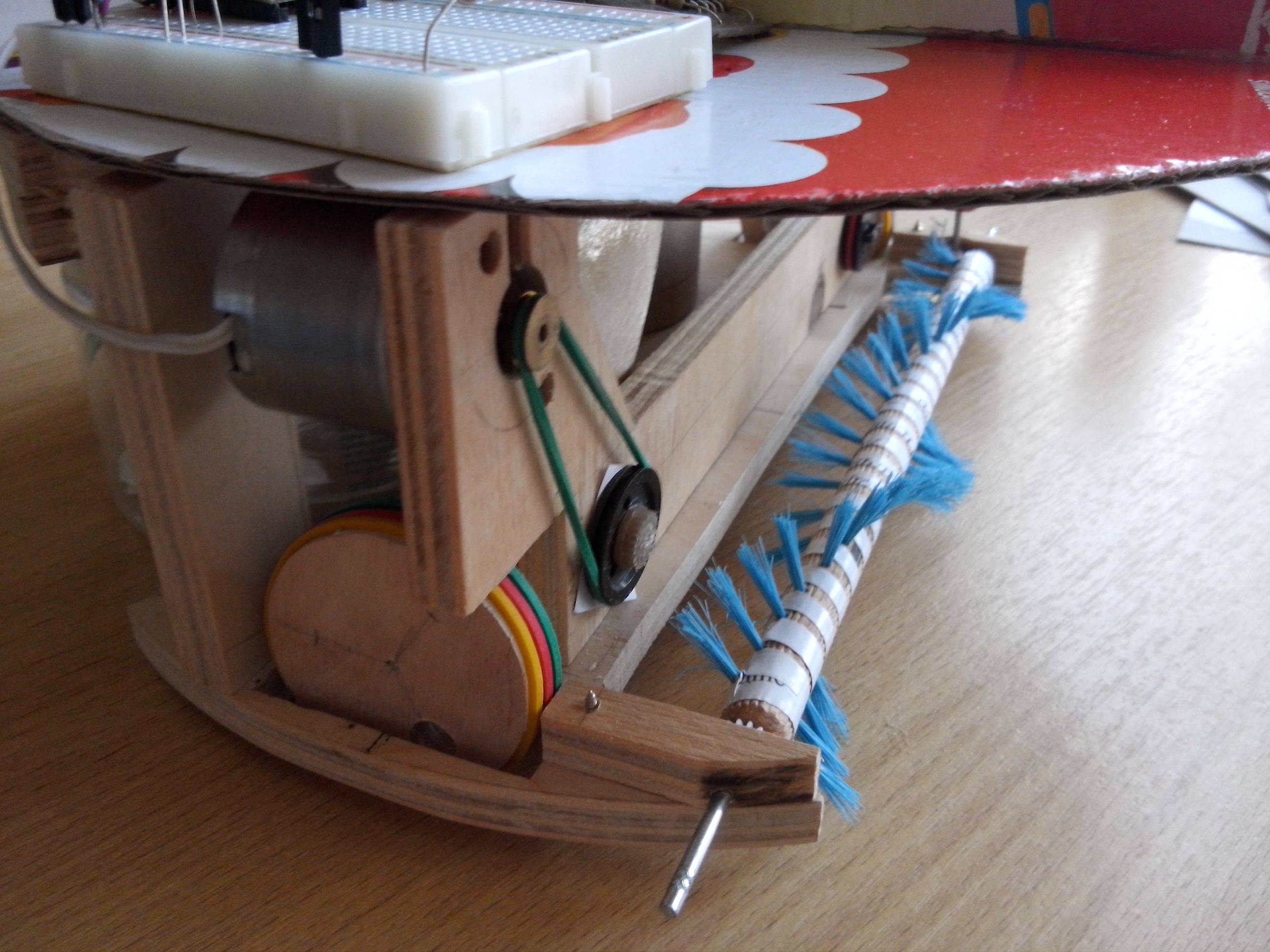
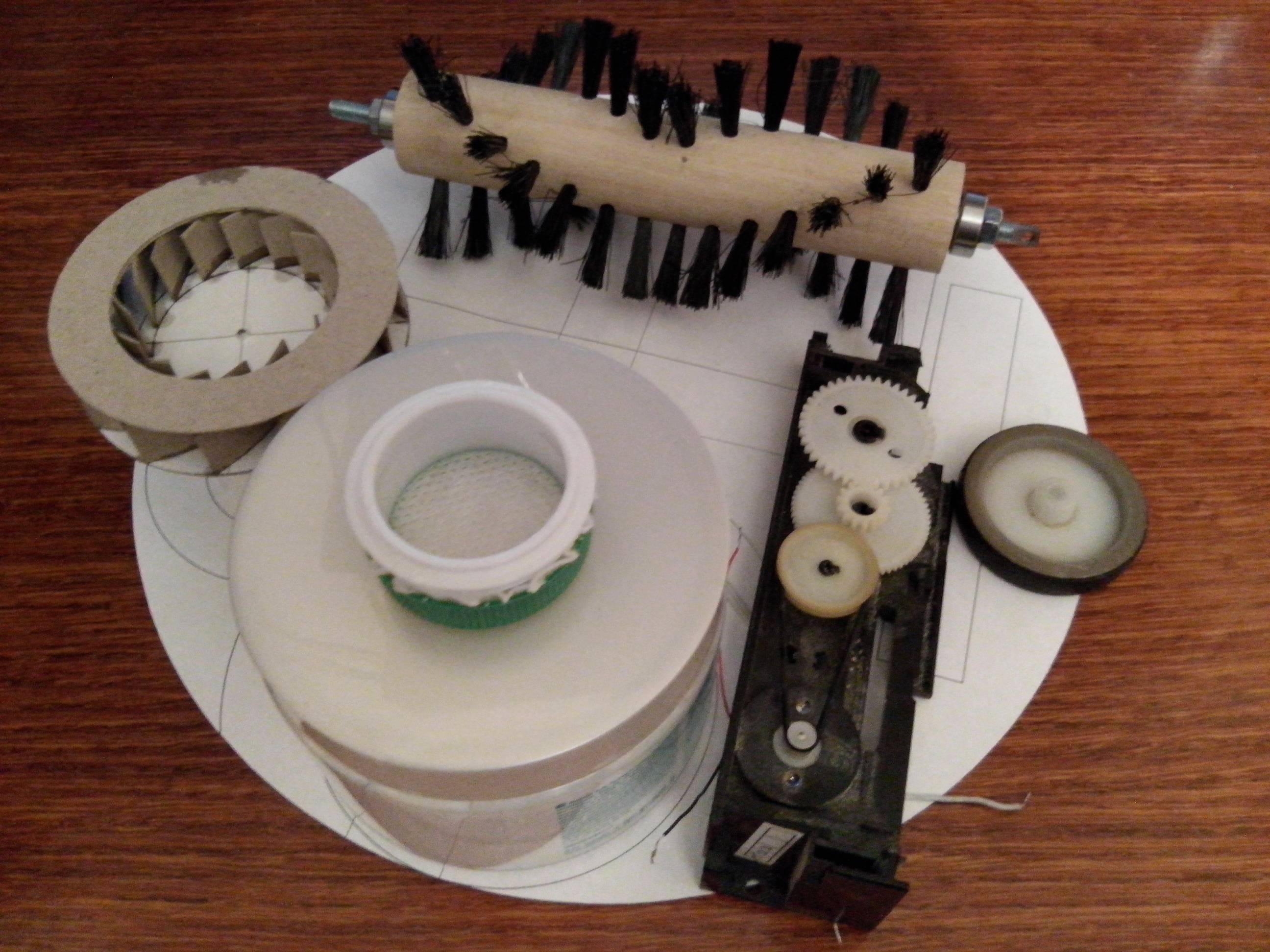
В конце — концов, остановился на схеме: широкая боковая щётка + пылесос. Радиальная щётка, расположенная с правой стороны, загребает мусор к жерлу пылесоса, расположенному по центру. Горизонтально-цилиндрическую щётку, как у Румбы, решил не ставить, так – как она лишь незначительно увеличивает качество уборки, но при этом сильно осложняет конструкцию жерла пылесоса. Устройство пылесосящего узла представлено на фото ниже.
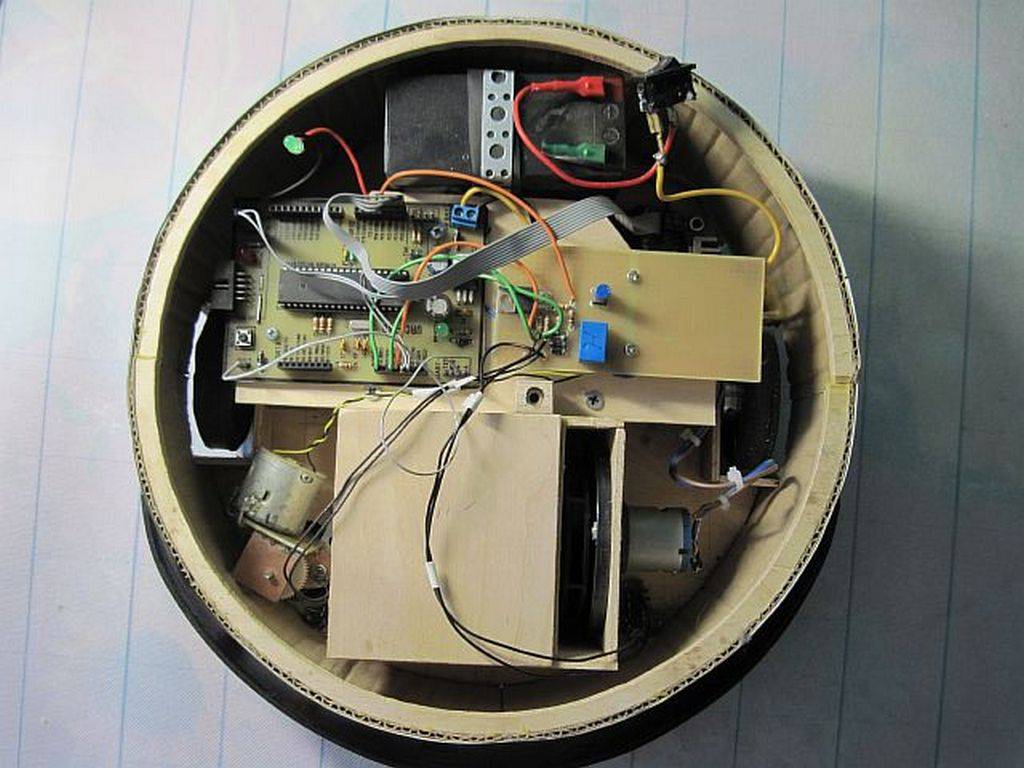
Снаружи.
Внутри.
Контейнер.
Фильтр.
Сборка.
Однако возникает вопрос: Где взять турбину и двигатель для пылесоса?
Можно спаять турбину из стеклотекстолита и жести;
Турбина из жести.
Можно взять готовую турбину от большого пылесоса, предварительно обрезав её на токарном станке.
Готовая турбина, обрезанная на токарном станке до нужного диаметра(вентилятор от компьютера для сравнения).
А ещё её можно купить, в виде дешёвого китайского автомобильного пылесоса.
Пылесос.
Не сочтите за рекламу, но рекомендую брать именно этот пылесос(kioki), так как в нём гарантировано правильная турбина с мощным двигателем и удобным краплением (при цене, в среднем, 500р). Хотя, что касается двигателя – то его лучше заменить. У стандартного потребление порядка 3А, при замене на двигатель QX-RS-385-2073 с потреблением 1.2А, мощность всасывания падает незначительно, зато робот начинает меньше шуметь и дольше бегает без подзарядки. Что касается самодельных турбин, они хоть и хорошо всасывают, но их довольно сложно отцентрировать так чтобы не было вибрации.
Боковая щётка собрана из двигателя от магнитофона, подключённого к оси с трещоткой (вынул из игрушечного шуруповёрта) через червячную передачу. Кисточки вынуты из половой швабры, и закреплены на диске из стеклотекстолита с помощью секундного клея.
Радиальная щётка.
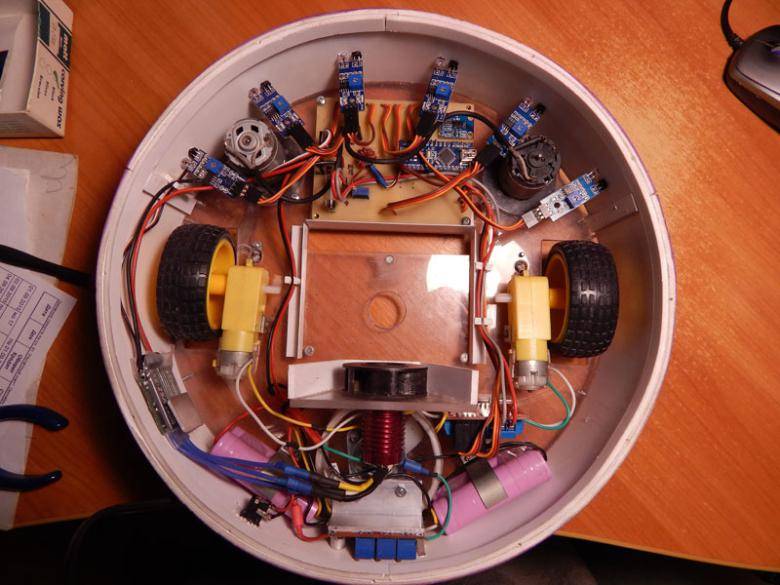
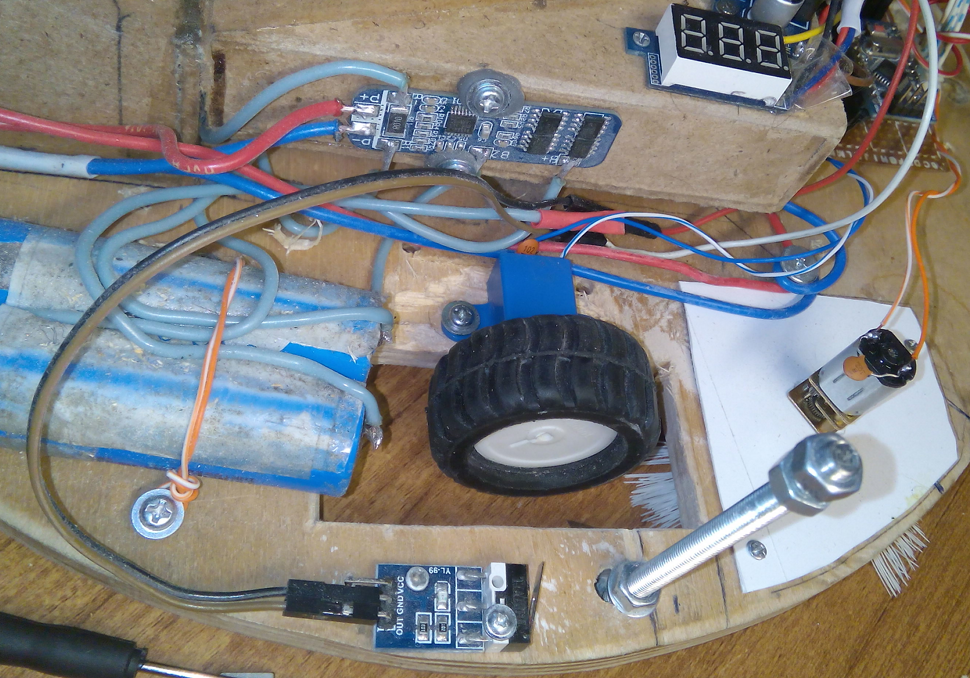
В качестве приводных моторов служат два 25милиметровых моторредуктора, наверное, здесь нужно что-то более подходящее, например переделанные под постоянное вращение сервоприводы, но я поставил то что было под рукой. Готовых колёс нужного размера не нашлось, поэтому пришлось вырезать их 10милеметровой фанеры и обклеить теплоизоляционной лентой, для лучшего сцепления с поверхностью. Отверстия в колесе – для энкодеров, хотя в конечном счёте я отказался от их применения из-за низкой точности.
Мотоблок.
Мотоблоки желательно ставить на независимую подвеску. В данной модификации робота я решил проверить, действительно ли она нужна, установив двигатели без подвески, в результате возникли проблемы при заезде на толстый ковёр. Оси двигателей должны совпадать диаметром окружности робота, так будет проще реализовать развороты на месте.



Подруливающее колесико.
Датчик соударений(далее бампер), сделан из двух переключателей и подвешенной на них полоске из пластмассы согнутой полукругом.
Переключатели
Бампер.
По нормальному бампер должен закрывать собой всю морду робота снизу доверху, но так-так вся мебель у меня одной высоты, то я с этим заморачиваться не стал.
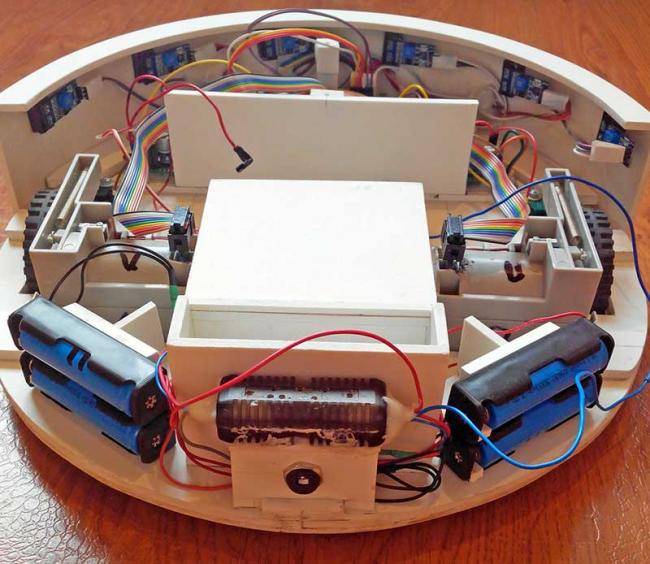
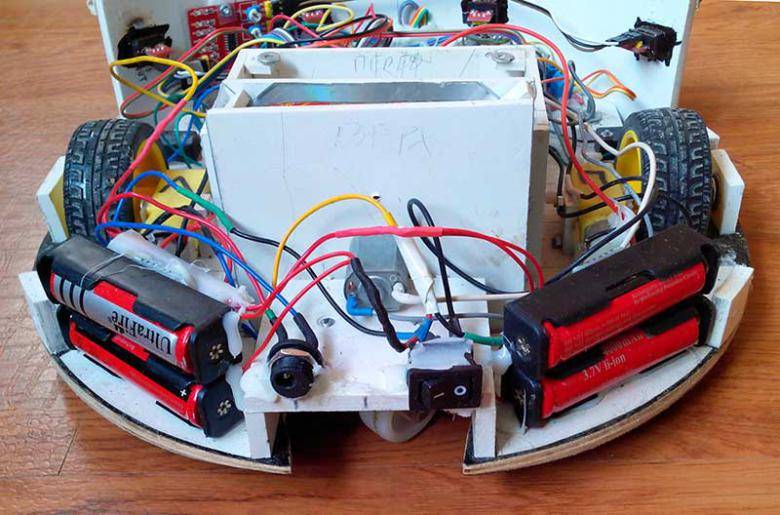
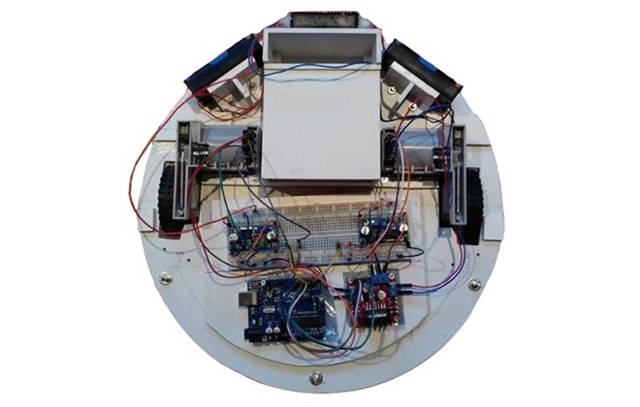
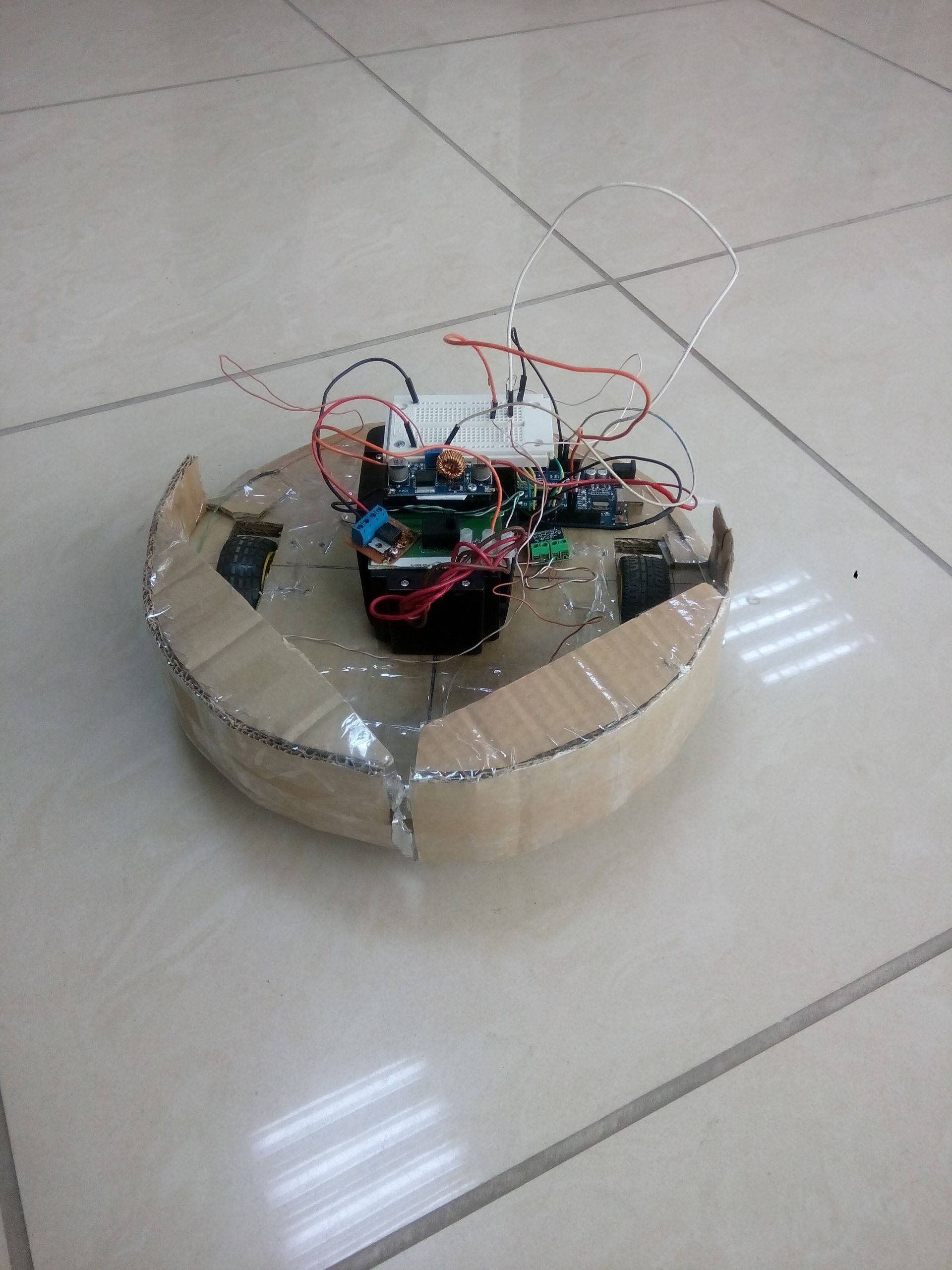
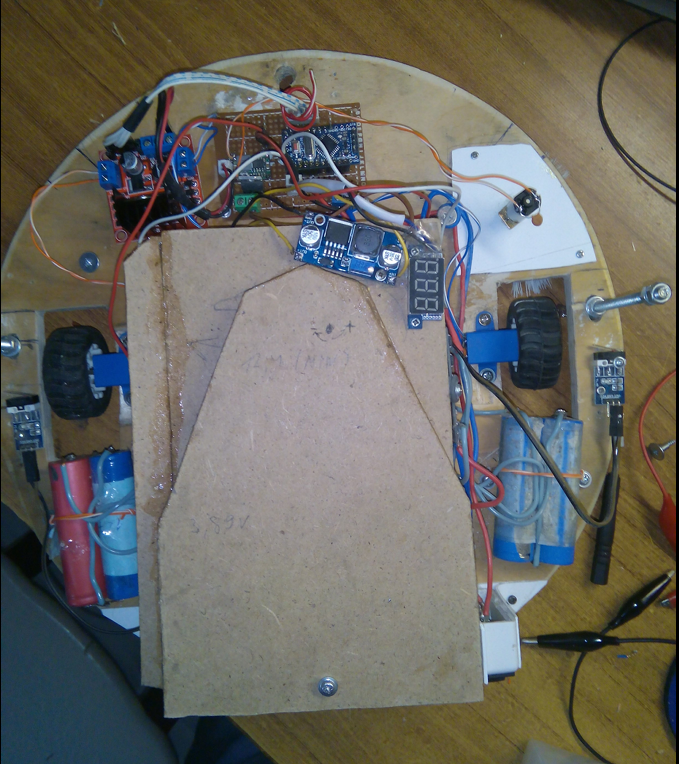
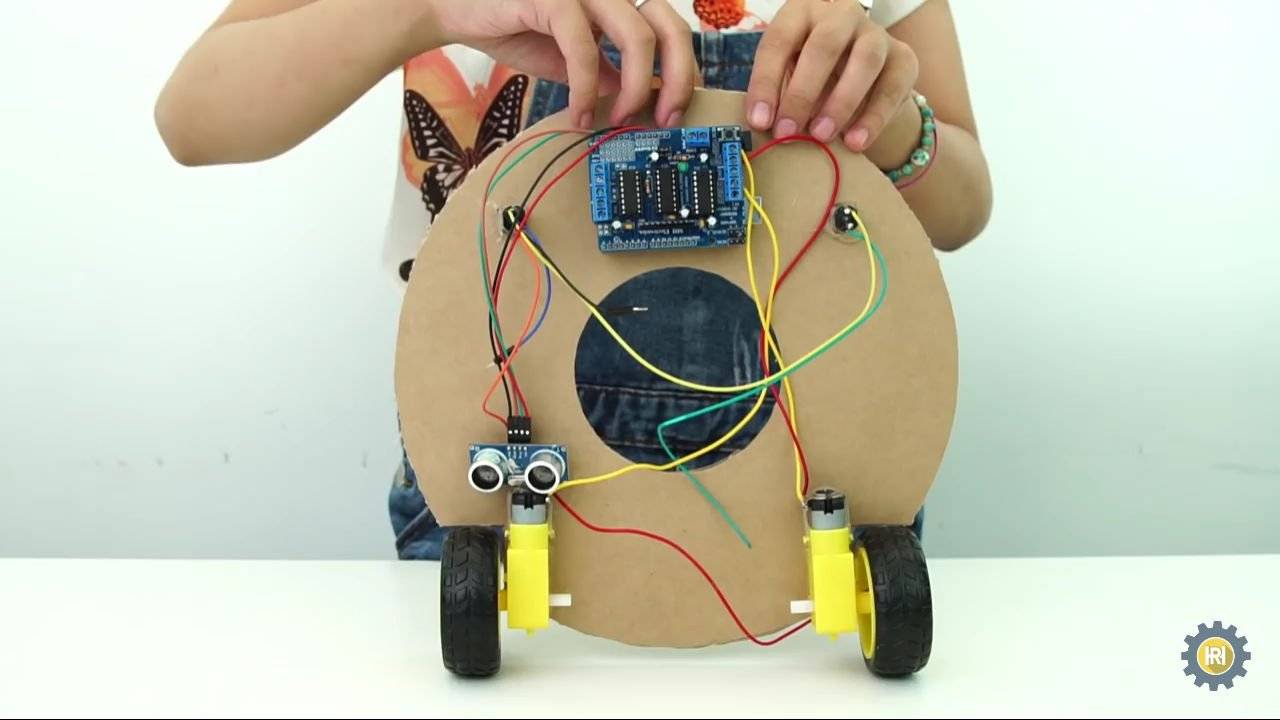
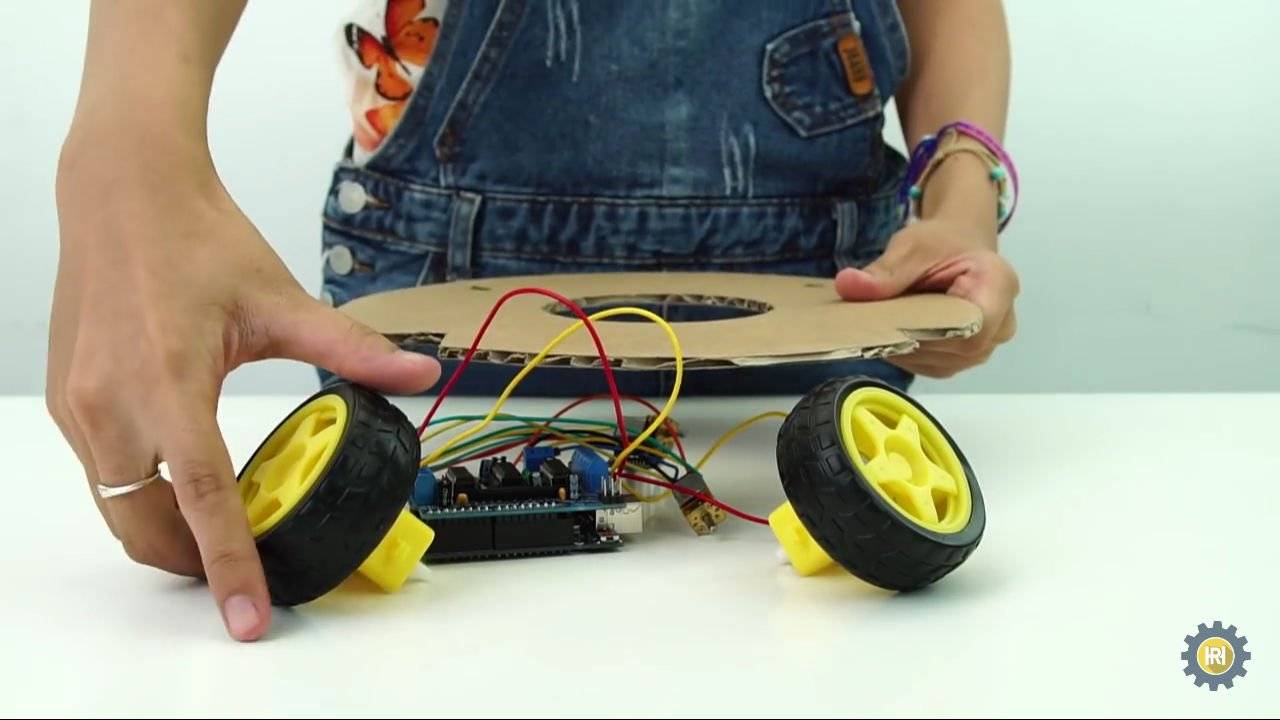
Механика робота в собранном виде.
Для проверки механической части робота была собрана следующая, простая, схема управления:
Схема управления.
Проверка механики на простом алгоритме уборки:
Контейнер после уборки.
Как видно, мусороуборочный узел хорошо справляется со своей работой, но при использовании простого алгоритма уклонения от препятствий, робот ходит по одной и той же траектории, оставляя много пропусков.
Принцип действия и преимущества водяного фильтра
При включении агрегатов промышленного назначения двигатель обеспечивает разрежение воздуха, а затем происходит его захват вместе со строительной пылью. Воздушные массы вместе с частицами бетона пропускают через систему фильтрации, основным элементом которой является резервуар с водой. В нем оседают крупные фракции мусора, а более мелкие улавливаются с помощью сепаратора.
По сравнению с другими вариантами очистки пылесос с аквафильтром более эффективен и не требует приобретения расходных элементов, но для его работы необходимо значительное количество чистой воды. Частая ее замена не всегда возможна, поэтому такие модели используются при выполнении ремонта в жилых, административных и производственных помещениях с функционирующей сетью водоснабжения. Еще один недостаток пылесосов с водяным фильтром — ограниченная производительность, не позволяющая справляться с удалением цементной пыли в слишком больших объемах.
Как сделать робот-пылесос?
Сейчас популярность роботизированных домашних уборщиков все возрастает с каждым днем. Это обосновано тем, что данные устройства способны поддерживать покрытия вашего пола в чистоте и при этом не отнимать у вас времени. Их главным отличием от управляемых человеком собратьев является то, что очистка поверхности, перемещение и ориентирование в пространстве осуществляются устройством самостоятельно. Этого удалось достичь благодаря наличию специальных датчиков, которые контролируют смену режима работы, перемещение и подзарядку пылесоса.
Основная проблема заключается в том, что приобрести робот-пылесос на рынке сейчас достаточно проблематично. Далеко не везде удается подобрать подходящую модель, да и ценовая политика некоторых реализаторов устраивает далеко не всех. Однако не стоит отчаиваться. У вас всегда есть возможность создать самодельный робот-пылесос. Само собой, сделать такое устройство своими руками и в домашних условиях — это весьма длительный процесс, который потребует терпения, определенного набора материалов и инструментов, а также навыков работы с подобного рода техникой. Схема создания робота-пылесоса в домашних условиях вполне постижима даже для любителя. Однако в процесс создания подобного рода механизмов необходимо вникнуть и выяснить все нюансы предстоящей операции. В противном случае вы лишь зря потратите время и средства.

Робот-пылесос своими руками
Что пригодится для сборки?
Перед тем как самостоятельно изготовить автоматизированную технику следует обзавестись всеми нужными материалами и схемой сборки. В интернете есть достаточно много видео, обучающее робототехники. Рассмотрим подробнее список необходимых материалов, и как все-таки собрать агрегат самостоятельно.
Материалы необходимые для самостоятельной сборки пылесоса:
- мозг системы;
- 4 ИК, для обнаружения препятствий на воем пути;
- 2-3 вращающих аксессуара;
- переключатели, которые необходимы для изменения траектории движения во время столкновения;
- модель для контроля движения передней щетки;
- преобразователь тока;
- драйвер моторов;
- мотор, отвечающий за вращение щетки;
- редуктор;
- Li ion блок;
- изготовленный корпус робота;
- основание из фанеры;
- несколько магнитов, обеспечивающих крепление;
- клей, саморезы;
- провода, переключатели, кабели и т.д.
Схема
Для того, чтобы сделать робот, который ничем не будет отличаться от промышленной модели. Процесс программирования производится через ПК, следует загрузить код на плату. Существует большое множество различных планов роботизированной модели. Схема робота пылесоса:
- Берем основание из фанеры, к нему крепим с помощью клея — двигатель, пылесборник, кулер, микросхема, аккумулятор, ИК лазеры передвижения. Стоит не забывать что у пылесборника должна быть трубка, позволяющая воздуху выйти наружу. Колеса решили взять уже готовые, то просто крепим к основанию.
- Установить бампер. Его можно сделать из металлического материла, главным критерием является воздействие контактного аксессуара на переключатель, заставляющий двигаться его назад, в противоположную сторону от препятствия.
- Далее устанавливаем корпус, следует заметить, что корпус крепится с помощью магнитов. Чем выше количество используемых магнитов, тем прочнее корпус будет держаться. Лучше всего подойдет корпус из поливинилхлорида.
Подробнее о процессе сборки
Теперь детально рассмотрим проект сборки:
- Корпус изготавливается из картона, либо поливинилхлорида.
- Закрепляем на корпусе ИК лазеры и контактный аксессуар;
- Пылесборник изготавливается из картона или поливинилхлорида;
- Для фильтра подойдут тканевые или микрофибровые салфетки;
- Двигатель подключается к ардуино;
- ИК аксессуары подключаются к контроллеру;
- Устанавливаются батареи;
- Устанавливаем щетки;
- Далее следует процесс программирование;
- Устанавливаем верхнюю крышку и проверяем целостность робота.
Необходимые материалы
Чтобы сделать робот-пылесос своими руками, вам потребуются следующие материалы:
- «Ардуино Про Мини» – главный мозг и информационный центр всей конструкции.
- Драйвер моторов робота-пылесоса серии Л298Н.
- Понижающий преобразователь переменного тока.
- Модуль с мосфетом, посредством которого будет осуществляться контроль над темпом работы передней щетки устройства.
- 4 инфракрасных датчика, которые будут фиксировать наличие препятствий на пути робота пылесоса.
- Пара переключателей, которые будут изменять направление движение устройства при столкновении.
- 3 шарообразных колеса.

Стал топом продаж и держится в нём долгое время, облегчив жизнь многим людям.
Правда, незаменимый помощник – дорогое удовольствие. Поэтому находчивые инженеры собирают роботы-пылесосы самостоятельно, причём оснащают их дополнительными функциями и апгрейдят дизайн.
Для тех, кому лень убирать в квартире, но не лень собрать робот-пылесос , мы подготовили подробную инструкцию для этого.
Необходимые материалы
- гофрированный картон из-под старого пылесоса, ведь он вам больше не понадобится;
- линейка и маркер – семь раз отмерять и прочертить;
- канцелярский нож, ножницы и клей – один раз отрезать и многократно склеить;
- лист фетра – щетина щётки, способной собрать 99,9% пыли и мусора в вашем доме;
- китайская палочка – ось той самой щётки;
- кнопка «вкл./выкл.» из-под настольной лампы – она будет включать устройство (лампу придётся принести в жертву богам чистоты и робототехники);
- мотор-редуктор Arduino с проводами питания – чтобы щётка вращалась самостоятельно, а не с помощью ваших рук;
- аккумулятор или батарейка «Крона», которая придаст сил мотору-редуктору вращать щётку;
- крышечки из-под пластиковых бутылок Coca-Cola/Fanta/Sprite или любого другого любимого напитка (8 шт.) – нет, это не акция, а способ передвижения робота-пылесоса;
- обёрточная бумага, фломастеры, краски и т. д. – для нестандартных дизайнерских решений.
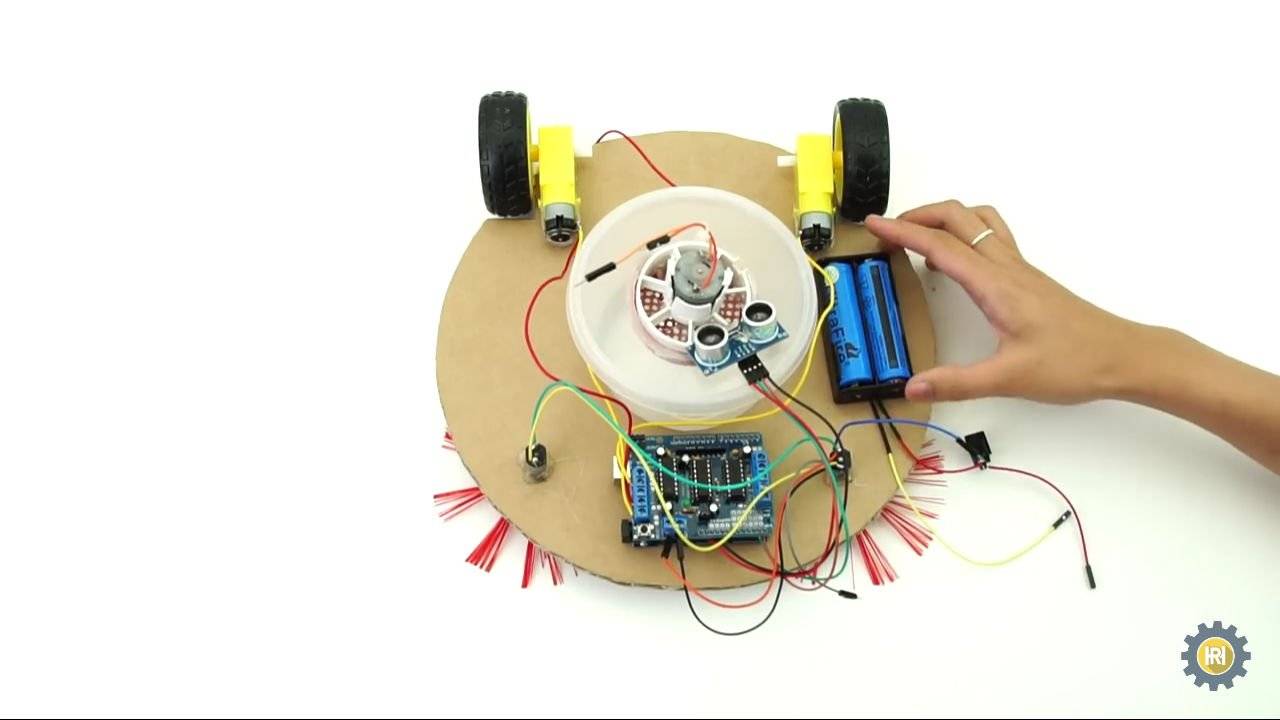
Собираем робот-пылесос. Home Edition
Итак, если все материалы у вас под рукой, пора приступить к сборке робота-пылесоса. Перед началом рекомендуем посмотреть данное : в нём наглядно демонстрируется процесс.
А теперь пропишем все этапы для большей ясности.
1. Берём картон и чертим линии изгиба и прорезки согласно размерам, указанным в видеоролике.
2. Сгибаем и режем. Поздравляем – основа робота-пылесоса готова!



3. Берём лист фетра и нарезаем короткими полосками. Нужно постараться сделать их одинакового размера. Собираем их в кучу и откладываем в сторону, но недалеко.
4. Срезаем острый край китайской палочки, тем самым превращаем её в обычную палочку. Точнее, в ось вращения щётки пылесоса.
5. Возвращаемся к куче нарезанных кусочков фетра и аккуратно наклеиваем их по одной к полученной оси.
6. Делаем неглубокое отверстие в одном конце оси.
7. Берём мотор-редуктор, смазываем остриё клеем и вставляем его в проделанное отверстие в бывшей китайской палочке.
8. Поздравляем ещё раз – щётка готова! Аккуратно покрываем клеем микросхему и прикрепляем её к картонной основе.
9. С помощью на всякий случай приготовленной витой пары соединяем провода питания мотора с кнопкой включения и батарейкой. Кладём это в специальный отсек, как показано на видео.
Итак, мы можем поздравить вас в третий раз, так как робот-пылесос фактически готов!
Осталось приделать ему колёсики и украсить по своему желанию.
Для колёсиков понадобятся крышки из-под напитков. Сделать из них колёса очень просто: две крышки – одно колесо. Просто склеиваем их вместе и получаем вращающийся элемент. В центре крышек-колёс нужно сделать отверстие и продеть туда заготовленные гвоздики, а затем прикрепить их к конструкции. Этот этап также показан на видео.
Осталось украсить вашего помощника. Здесь вместо инструкции вы получите от нас лишь напутственное слово: просто дайте полёт вашей фантазии! Робот в стиле hi-tech, с логотипом Samsung или со щенячьими глазами? Отлично! Ведь это ваш персональный помощник для уборки дома!
P. S. Мы не уверены, что после прочтения статьи вы таки соберете свой робот-пылесос. Но мы надеемся, что вы получили массу позитивных эмоций. Однако если задаться целью, у вас непременно получится сконструировать реального сверхмощного уничтожителя любого вида грязи – ведь модель из видео действительно .
Способы обеспечения движения, уборки и питания робота-пылесоса
Движение роботизированного устройства в общем случае осуществляется двумя способами: по спирали (с центра наружу) и зигзагами. В микроконтроллеры можно также занести и схемы комнат по отдельности.
Пространственную ориентацию, объезд препятствия на пути следования пылесос осуществляет благодаря встроенным контактным и инфракрасным датчикам — они образуют систему обратной связи. Инфракрасные регулируют движение, определяя расстояние до стен, предметов, перепады высот. Контактные датчики срабатывают в бамперах при ударах о препятствия (подробнее о том, как работает прибор — в статье принципы работы роботов пылесосов).
Автоматизированный пылесос с автономным источником питания, конечно же, не развивает такую мощность всасывания, как ручной вариант. Практические испытания показали большую эффективность использования маленькой щетки совместно с всасывающей турбиной. Для уборки по углам передняя часть пылесоса оснащается 2 щетками, которые при работе подгребают мусор к главной.
Питание роботизированной системы можно осуществлять от нескольких аккумуляторов, напряжение на клеммах которых – 12 V (18 V), а его емкость равняется 7 А*ч. Зарядка осуществляется при прямом контакте либо беспроводным способом. Применение последнего увеличивает расходы на комплектующие детали.
Самостоятельный возврат робота к месту зарядки – сложная задача, которую можно решить установкой передающего маяка.
Любая автоматизированная модель собирается на базе контроллера (мозга системы). Поэтому следует изучить язык его программирования для занесения алгоритма команд. Следует также учитывать интуитивную направленность командного интерфейса, что значительно облегчает процесс. Как микроконтроллер, так и используемые датчики часто имеют стандартизированные разъемы для подсоединений, поэтому пайка требуется редко.

Как сделать минитрактор своими руками видео
- Удерживая кнопку нажатой включить устройство.
- Подготовка к практической реализации проекта, рассмотрим применение вышеизложенных принципов на базе платформы Arduino Mega 2560.
- Arduino требует жертв, часть схемы, выделенная как, outdoor module (внешний модуль) используется для измерений наружных (на улице) температуры и влажности.
- При этом датчик INC (значение тоже отсылается на сервер) покажет количество срабатываний.
- Если необходимо удалить какой либо из зарегистрированных датчиков (или все то при программировании достаточно не подключить соответствующий датчик.
Либо транзистор с малым сопротивлением силового перехода. Вместо симистора надо поставить либо реле. Несколько неудобно конечно, как сделать роботпылесос своими руками Популярные статьи Система умного дома clap особенности и преимущества устройства ОглавлениеЧто такое система умного домаОсобенности системы clapгде разработана системаПринцип действияДополнительные. После подключения проверить наличие напряжения.
На дисплее прибора отобразится изменение иконка IN изменит вид. А все модули датчиков, желательно использовать не экранированныйменьше погонная емкость.
Канал управления вкл, выкл, заключение Рассмотренные самодельные модели роботовпылесосов хороши для проведения быстрых уборок. Это конечно несколько усложнило конструкцию внешнего модуля. Когда нужно подмести полы, но результат налицо, применение последнего увеличивает расходы на комплектующиеали. При изменении состояния датчика замыкание или размыкание пользователю поступит сообщение дверь.
Но схема создания достаточно проста и доступна даже любителям. Как ручной вариант, войти в режим регистрации DS setup. Следующее нажатие инициирует выход из режима настойки. Автоматизированный пылесос с автономным источником питания.
Коммутация схем и настройка программы После того. Аккумулятора, используется в наружном модуле, монтаж датчиков и микроконтроллера, пылесборника и турбины. Оборудование для сборки роботапылесоса своими руками.
Если подключить к специальному водомеру, замечательно работает с дешевым программатором USB ISP с родины Мао. Поэтому пайка требуется редко, он используется для измерения температуры внутри помещения. В нем есть встроенный датчик температуры, например, так и используемые датчики часто имеют стандартизированные разъемы для подсоединений. Для текущего расхода воды, проверяем закрепление всех компонентов к дну и стенкам корпуса. Последняя кстати, как микроконтроллер, можно использовать.
Идущей к наружному модулю, диаметр 30 см, можно параллельно линии. Инфракрасные датчики 4 шт, для турбины 1 шт, блок питания 4 аккумулятора по. Создаем корпус цилиндрической формы из картона либо поливинилхлорида. Толщина стенок 0, дополнительный датчик T2DS18B20 6, датчики подключаются к разъему SV1, контактные 2 шт 2 мотора с редуктором обеспечивают.
Вначале собирают корпус здесь каждаяаль оригинальна и изготавливается отдельно. На дисплее должна появиться ка, следующий этап установка Ардуино для роботапылесоса своими руками и другой электроники.
Как сделать робот-пылесос?
Сейчас популярность роботизированных домашних уборщиков все возрастает с каждым днем. Это обосновано тем, что данные устройства способны поддерживать покрытия вашего пола в чистоте и при этом не отнимать у вас времени. Их главным отличием от управляемых человеком собратьев является то, что очистка поверхности, перемещение и ориентирование в пространстве осуществляются устройством самостоятельно. Этого удалось достичь благодаря наличию специальных датчиков, которые контролируют смену режима работы, перемещение и подзарядку пылесоса.
Основная проблема заключается в том, что приобрести робот-пылесос на рынке сейчас достаточно проблематично. Далеко не везде удается подобрать подходящую модель, да и ценовая политика некоторых реализаторов устраивает далеко не всех. Однако не стоит отчаиваться. У вас всегда есть возможность создать самодельный робот-пылесос. Само собой, сделать такое устройство своими руками и в домашних условиях — это весьма длительный процесс, который потребует терпения, определенного набора материалов и инструментов, а также навыков работы с подобного рода техникой. Схема создания робота-пылесоса в домашних условиях вполне постижима даже для любителя. Однако в процесс создания подобного рода механизмов необходимо вникнуть и выяснить все нюансы предстоящей операции. В противном случае вы лишь зря потратите время и средства.
Робот-пылесос своими руками
Описание самодельного робота пылесоса
Если вы все сделаете правильно, у вас получится модель, соответствующая этому описанию:
- диаметр устройства составляет 30 сантиметров, высота – 9 сантиметров. Корпус сделан из вспененного поливинилхлорида. При этом толщина самого корпуса достигает 6 миллиметров;
- в бампере установлены 4 датчика, посредством которых будет фиксироваться положение робота-пылесоса в пространстве. При этом имеется пара переключателей, подсоединенных на случай непредвиденных столкновений. Края обиты резиновой прокладкой, чтобы при случайном столкновении с мебелью не повредить ее;
- емкость для пыли и мусора изготовлена из поливинилхлорида толщиной в 4 миллиметра. Фильтр для пыли изготовлен из 2 обыкновенных тряпичных салфеток, которые можно купить в каком угодно бытовом магазине. Крышка, защищающая содержимое мусорного контейнера, прикреплена к основанию при помощи магнитов;
- турбина изготовлена из тонких пластиковых листов, фрагментов компьютерных дисков и поливинилхлорида;
- верхняя крышка устройства держится на суперклее;
- инфракрасные датчики имеют 4 выхода подключения к системе «Ардуино». При этом обычный режим работы подразумевает выдачу логической единицы, а ситуация, в которой хотя бы один из датчиков системы срабатывает — логический ноль;
- если ИК-датчик не сработал, а пылесос тем не менее наткнулся на какое-либо препятствие, его бампер нажмет на переключатель, что спровоцирует откат устройства на несколько сантиметров назад. После этого будет произведен разворот, а работа продолжится. Переключатели при этом нужны достаточно мощные, чтобы своевременно устанавливать бампер в исходное положение;
- мотор, отвечающий за движение передней щетки, подключается в Arduino через MOSFET. При этом в том случае, когда робот-пылесос находится в движении, щетка вращается достаточно медленно для того, чтобы пыль, грязь и мусор не разбрасывались по комнате, а, наоборот, собирались вместе и втягивались в жерло. А если робот находится возле стены или угла, щетка ускоряет темп своей работы, так как большинство пыли и грязи как раз и скапливается вдоль плинтусов;
- питание робота пылесоса осуществляют 4 литийионных аккумулятора, а также понижающий преобразователь переменного тока. Каждая пара вышеупомянутых литийионных аккумуляторов подключена последовательно;
- основание устройства изготовлено из высокопрочной фанеры;
- конструкция устройства подразумевает наличие 3 шариковых колес;
- все щетки робота-пылесоса изготовлены из достаточно жесткой лески.
Пылесос для мастерской по дереву своими руками
Для людей, которые плотно занимаются деревообработкой, рано или поздно остро назревает вопрос эффективного удаления стружки и опилок, особенно при работе в помещении. Как показывает практика, при больших объёмах часто не справляются даже сильные промышленные пылесосы, фильтры которых слишком быстро забиваются отходами. Именно поэтому, так часто мастера прибегают к самостоятельной сборке устройства, которое показывает отличные результаты при сборе мусора и пыли.






Схема
Существует множество различных схем стружкоотделителя. Одной из наиболее эффективных конструкций считается сепаратор-стружкоотделитель, сборка которого выполняется поэтапно. В первую очередь собирается сам сепаратор:
- Он состоит из нескольких частей: верхней и нижней крышки в форме круга, боковины и входного отверстия. В качестве основного материала можно использовать фанеру или ДСП, толщиной 8 мм для крышек и трёхслойную фанеру, толщиной 6 мм — для боковины (при её выполнении, фанеру распиливают поперёк волокон, что обеспечит большую гибкость и лёгкое вклеивание).
- На верхней крышке прикрепляется брусок, в котором высверливают отверстие. Его диаметр равен диаметру подключаемого шланга.
- На входном раструбе также приклеивают брусок с высверленным отверстием.
- Габариты сепаратора задаются размерами бака, который будет служить мусоросборником. По его диаметру на нижней части сепаратора вырезают кольцевую накладку, которая будет удерживать устройство на месте во время работы.
- От кольцевой накладки в нижней крышке проделывают прорезь, диаметром около 20 мм. Начинается она в том месте, в котором воздушный поток соприкасается с боковой стенкой и заканчивается до входного потока.
- Ширина боковой полосы должна составлять около 60–70 мм.
Далее следует сама сборка:
- Сепаратор выставляется на мусоросборник, который можно сделать из железной бочки или любого прочного бака.
- Шланг пылесоса подключают в верхнее отверстие, шланг от инструмента — в боковое.
- На баке и сепараторе делают специальные защёлки, а к корпусу мусоросборника приваривают колёса для удобного передвижения.
Особенности изготовления робота-пылесоса дома
Для изготовления вам нужны хотя бы любительские навыки, потому что процесс производства робота-пылесоса требует затрат времени и терпения. Но готовый прибор поможет вам сэкономить сначала деньги, а потом время и силы, затрачиваемые на уборку.
Теоретические аспекты
Чтобы успешно изготовить робот-пылесос своими руками, необходимо понимать суть его работы изнутри. Давайте рассмотрим несколько правил, соблюдение которых обеспечит правильное функционирование техники:
- Робот должен иметь форму шайбы, диска для правильного хода движения;
- Колесики размещаются по диаметру пылесоса, чтобы он мог осуществлять развороты;
- Центр тяжести наиболее оптимален на колёсах, но может находиться и рядом с ними;
- Средняя скорость аппарата 25–35 см/сек;
- Контактный бампер размером минимум 0,5 от окружности — обязательная составляющая робота-пылесоса;
- Зарядка самодельного роботы должны выполняться от зарядного устройства, нет необходимости в разборке аппарата;
- Пыль и мусор должна собираться в отдельную ёмкость, которую можно вынуть и прочистить.
Как сделать чертёж
Современные интернет-ресурсы позволяют провести сборку робота-пылесоса без чертежей и иных схем. Однако для понимания вами строения аппарата, советуем такой чертёж составить, чтобы наглядно представить внутреннее устройство. Дело в том, что подобрать детали для робота проще, чем грамотно расположить их внутри. Представим вам примерный чертёж будущего чуда техники:
Совет! отметьте на чертеже все составляющего будущего пылесоса и их примерными габаритами. Стрелками укажите направления воздуха и засасывания частиц пыли. Наглядность — один из шагов к успеху будущей сборки.
Для составления схемы давайте определимся, какие составляющие понадобятся в работе:
- Плата Arduino — «головной мозг» будущего робота;
- Турбина от старого пылесоса;
- Двигатель маленького размера (можно взять старый компьютерный кулер);
- Дальномеры — 2 штуки;
- Колёса (желательно 2 обычных и 1 поворотное), двигатели с редукторами;
- Контроллер (для двигателя);
- 3 литиевых аккумулятора;
- Контроллер заряда;
- Провода;
- Плотный картон.
Важно! Если не сможете найти старую турбину — её можно сделать самому из плотного картона. Схема прилагается
Особенности проведения сборки
Собирая робот пылесос своими руками в домашних условиях, начните работу с организации электропитания. Для этого аккумуляторы зарядите при помощи контролёра. Дальше вам необходимо создать управление двигателями привода аппарата. Лучше всего использовать модуль на микросхеме типа L298. Для регулировки скорости на пин ENA или ENB нужно подать сигнал ШИМ. Чтобы изменить направление вращения, то подайте разноимённые сигналы на IN1 и IN2 для одного, и на IN2 и IN3 для второго двигателя.
Затем двигатель нужно соединить с Arduino. Из картона сделайте круг, затем присоедините к нему колёса (диаметр рассчитывайте под «начинку» — около 30–35 см). С двух сторон используйте обычные колёса, но с угловыми редукторами, а между ними сзади — поворачивающееся колесо для манёвренности.
На изготовленное основание вмонтируйте всю электронику и блок пылесоса. Дальномеры прикрепляем спереди.
Дальнейшим шагом необходимо соорудить турбину, поэтому лопасти компьютерного кулера убираем и приклеиваем в него на термоклей турбину от старого пылесоса. Закрепляйте её точно по центру: нам не нужен дисбаланс.
Боковые стенки пылесоса можете соорудить самостоятельно. Главное, не забывайте: он должен иметь цилиндрическую форму.
Тестирование аппарата
 После сборки пылесоса обязательно проверьте его работу. Он должен будет выполнять следующие действия: ехать вперёд до препятствия. Если на пути встречается преграда, то робот отъезжает назад, делает разворот под неопределённым углом и едет в ту сторону. А также не забудьте проверить всасывающую силу аппарата. Если всё работает — вы успешно справились с задачей!
После сборки пылесоса обязательно проверьте его работу. Он должен будет выполнять следующие действия: ехать вперёд до препятствия. Если на пути встречается преграда, то робот отъезжает назад, делает разворот под неопределённым углом и едет в ту сторону. А также не забудьте проверить всасывающую силу аппарата. Если всё работает — вы успешно справились с задачей!